Aeolus Robotics
This company launched their new robot designed to help with household tasks.
It’s a dual-arm mobile manipulator for the home, similar to robots like the PR2 by Willow Garage and HERB from Carnegie Mellon.
It has a 7 DOF arm, 2 DOF torso, and a 2 DOF pan-tilt head incorporating a stereo camera.
They had an impressive live demo showing the robot’s capabilities in a model home. The robot picks a toy off the floor, lifts and moves a chair, picks-up a TV remote control, vacuums the floor and grasps a can of soda (see video 1 below).
They also had a separate demo of their object recognition system, with a camera detecting objects on a turntable (Fig. 6).
A few interesting points:
• The shoulder yaw axis only seems to have a very small range of motion. It’s not clear if this is a design decision or something else.
• The second arm is just a 2 DOF shoulder with a special tool designed for carrying a vacuum cleaner. The tool needs to be flipped downwards before the vacuum can clip-in, and presumably this was done by a human for the demo.
• There is an additional manipulator in the chest, which is a lifting arm that the robot can use to lift chairs.
• It looks like the robot has multiple steerable castor wheels in the base, because it can both turn on the spot and reverse-turn like a car.
Website: www.aeolusbot.com
|
Fig. 1: |
Fig. 2: |
Fig. 3: |
|
Fig. 4: |
Fig. 5: |
Fig. 6: |
|
Video 1: |







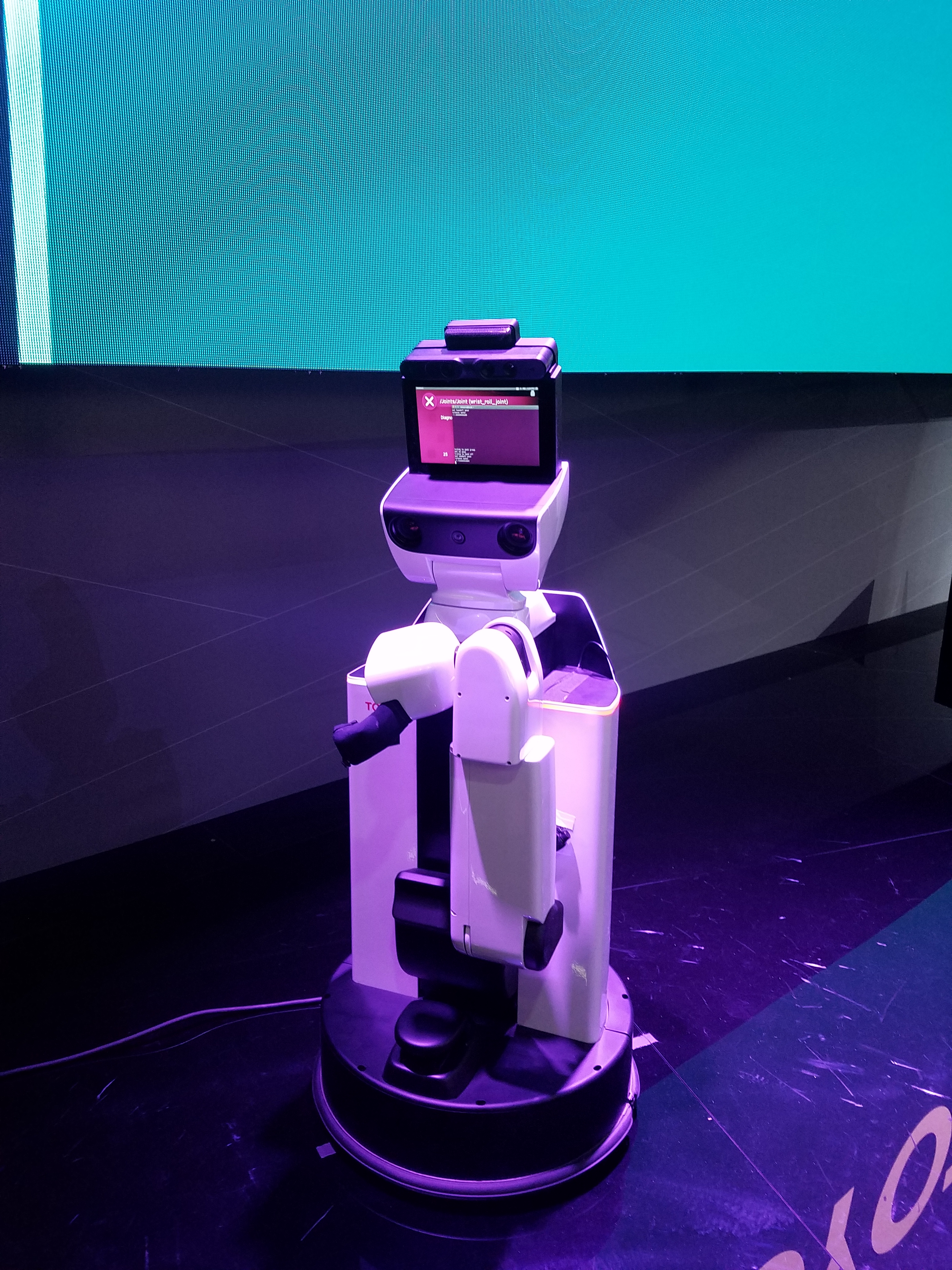
Toyota
They were giving live demos of their HSR (Human Support Robot). The robot detects a plastic bottle of water on the table, grasps it and offers it to the person (see video 2 below).
I only saw the robot do one task so I would assume that the robot is hard-coded to turn right until it detects a bottle of water on the table.
Also, it’s not clear if the robot actually recognizes the bottle or just that there is ‘something’ on the table.
In the photos below you can see some screens from their software, which runs on ROS and Ubuntu (Fig. 3-4).
Website: www.toyota-global.com/partner_robot/
|
Fig. 7: |
||
|
Fig. 8: |
Fig. 9: |
Fig. 10: |
|
Video 2: |