Patents:
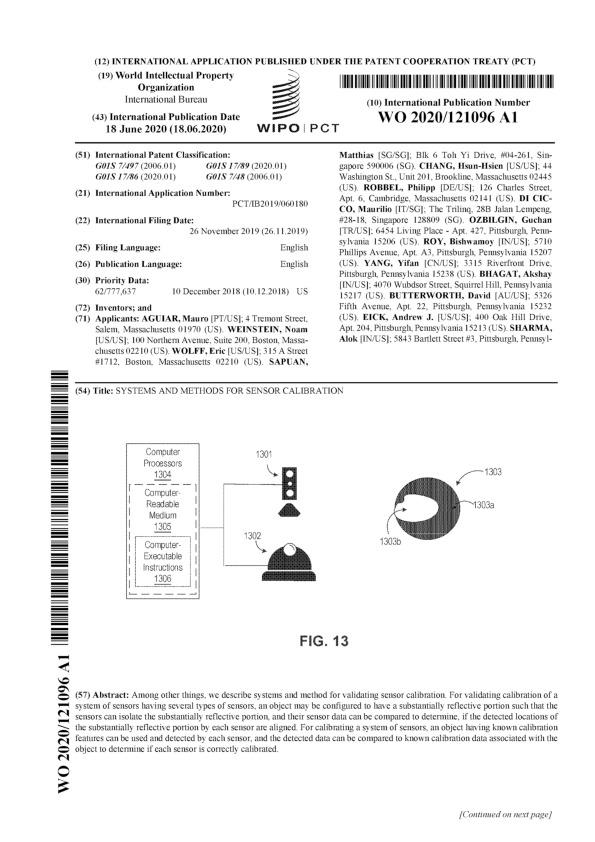 |
Mauro Aguiar, Noam Weinstein, Eric Wolff, Matthias Sapuan, Hsun-Hsien Chang, Philipp Robbel, Maurilio Di Cicco, Guchan Ozbilgin, Bishwamoy Roy, Yifan Yang, Akshay Bhagat, David Butterworth, Andrew J. Eick, Alok Sharma and Junqing Wei, “Systems and Methods for Sensor Calibration“, filed November 2019, published June 2020.
BibTeX PDF |
|
|
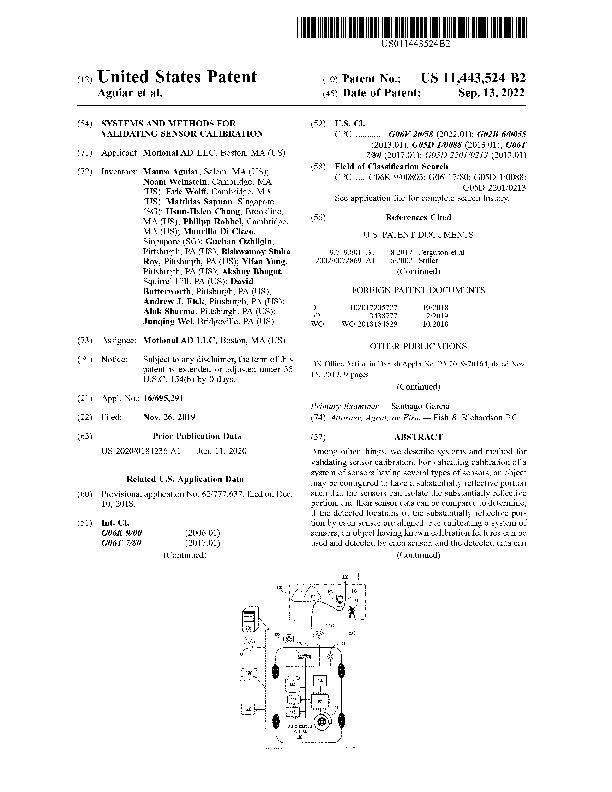 |
Mauro Aguiar, Noam Weinstein, Eric Wolff, Matthias Sapuan, Hsun-Hsien Chang, Philipp Robbel, Maurilio Di Cicco, Guchan Ozbilgin, Bishwamoy Sinha Roy, Yifan Yang, Akshay Bhagat, David Butterworth, Andrew J. Eick, Alok Sharma and Junqing Wei, “Systems and Methods for Validating Sensor Calibration“, filed November 2019, published September 2022.
BibTeX PDF |
|
|
Journals:
 |
G. Clark Haynes, David Stager, Anthony Stentz, J. Michael Vande Weghe, Brian Zajac, Herman Herman, Alonzo Kelly, Eric Meyhofer, Dean Anderson, Dane Bennington, Jordan Brindza, David Butterworth, Chris Dellin, Michael George, Jose Gonzalez-Mora, Morgan Jones, Prathamesh Kini, Michel Laverne, Nick Letwin, Eric Perko, Chris Pinkston, David Rice, Justin Scheifflee, Kyle Strabala, Mark Waldbaum and Randy Warner, “Developing a Robust Disaster Response Robot: CHIMP and the Robotics Challenge“, Springer Tracts in Advanced Robotics (STAR), Volume 121, The DARPA Robotics Challenge Finals: Humanoid Robots To The Rescue, April 2018.
BibTeX PDF
A version of this article was previously published, see below. |
|
|
 |
G. Clark Haynes, David Stager, Anthony Stentz, Brian Zajac, Dean Anderson, Dane Bennington, Jordan Brindza, David Butterworth, Chris Dellin, Michael George, Jose Gonzalez-Mora, Morgan Jones, Prathamesh Kini, Michel Laverne, Nick Letwin, Eric Perko, Chris Pinkston, David Rice, Justin Scheifflee, Kyle Strabala, J. Michael Vande Weghe, Mark Waldbaum, Randy Warner, Eric Meyhofer, Alonzo Kelly and Herman Herman, “Developing a Robust Disaster Response Robot: CHIMP and the Robotics Challenge“, Journal of Field Robotics (JFR), Volume 34, Issue 2, Special Issue on the DARPA Robotics Challenge Finals, March 2017.
BibTeX PDF |
Conferences:
 |
Siddhartha S. Srinivasa, Aaron M. Johnson, Gilwoo Lee, Michael C. Koval, Shushman Choudhury, Jennifer E. King, Christopher M. Dellin, Matthew Harding, David T. Butterworth, Prasanna Velagapudi and Allison Thackston, “A System for Multi-step Mobile Manipulation: Architecture, Algorithms, and Experiments“, International Symposium on Experimental Robotics (ISER), Tokyo, Japan, October 2016.
BibTeX PDF |
|
|
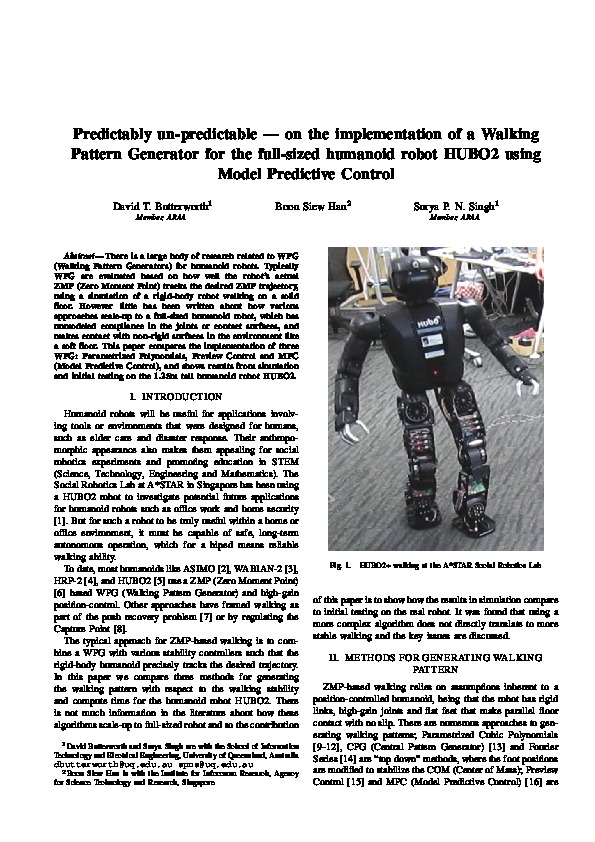 |
David T. Butterworth, Boon Siew Han and Surya P. N. Singh, “Predictably un-predictable — on the implementation of a Walking Pattern Generator for the full-sized humanoid robot HUBO2 using Model Predictive Control“, Australasian Conference on Robotics and Automation (ACRA), Sydney, Australia, December 2013.
BibTeX PDF |
|
|
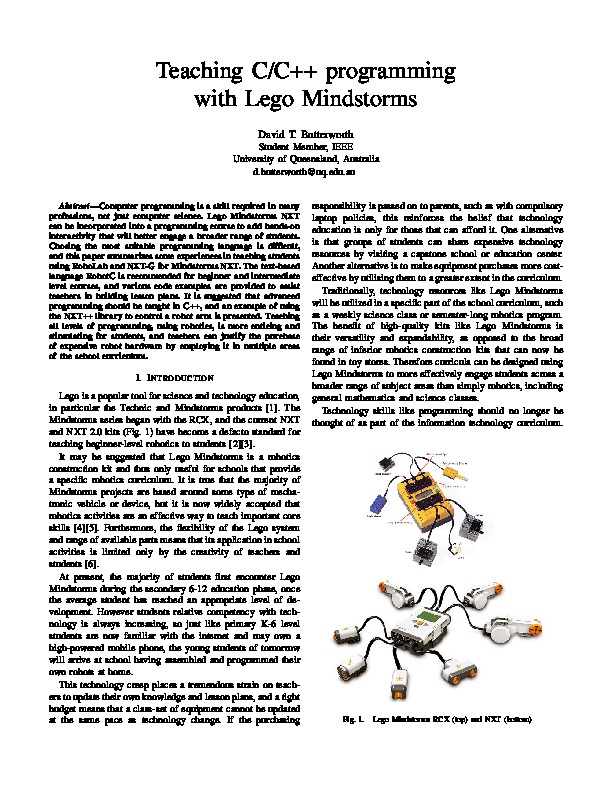 |
David T. Butterworth, “Teaching C/C++ programming with Lego Mindstorms“, 3rd International Conference on Robotics in Education (RIE), Prague, Czech Republic, September 2012.
BibTeX PDF |
Theses:
 |
David T. Butterworth, “A Fast & Efficient Mission Planner for Multi-rotor Aerial Vehicles in Large, High-resolution Maps of Cluttered Environments“, Master’s Thesis, Technical Report CMU-RI-TR-17-07, Robotics Institute, Carnegie Mellon University, Pittsburgh, USA, May 2017.
BibTeX PDF |
|
|
 |
David T. Butterworth, “Implementation of Walking Pattern Generator and Stability Analysis for Biped Robot Walking on Deformable Surface“, Bachelor’s thesis (un-published), University of Queensland, Brisbane, Australia, November 2013.
BibTeX PDF |
Other:
The following 2 papers were a continuation of my research and software code from 2017:
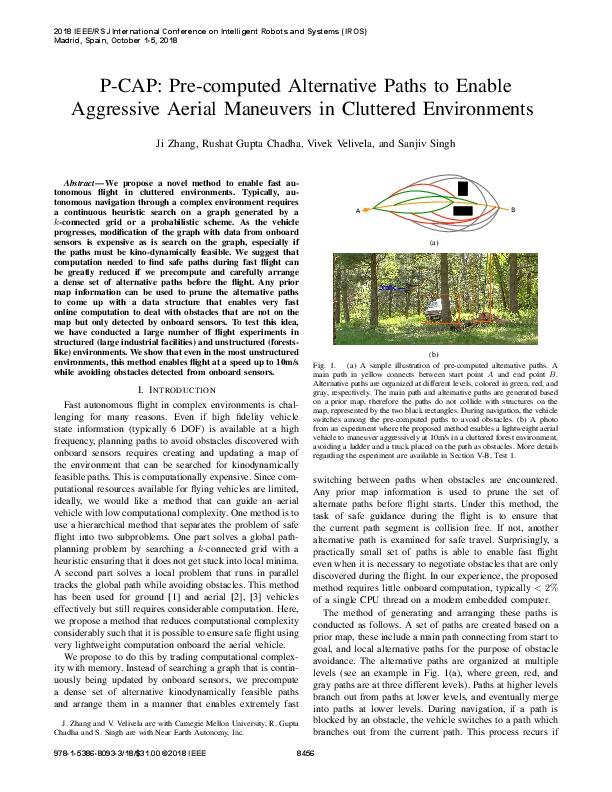 |
Ji Zhang, Rushat Gupta Chadha, Vivek Velivela and Sanjiv Singh, “P-CAP: Pre-computed Alternative Paths to Enable Aggressive Aerial Maneuvers in Cluttered Environments“, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, October 2018.
BibTeX PDF |
|
|
 |
Ji Zhang, Rushat Gupta Chadha, Vivek Velivela and Sanjiv Singh, “P-CAL: Pre-computed Alternative Lanes for Aggressive Aerial Collision Avoidance“, 12th International Conference on Field and Service Robotics (FSR), Tokyo, Japan, August 2019.
BibTeX PDF |
@misc{patent_WO2020121096_A1,
author = {Mauro Aguiar
and Noam Weinstein
and Eric Wolff
and Matthias Sapuan
and Hsun-Hsien Chang
and Philipp Robbel
and Maurilio Di Cicco
and Guchan Ozbilgin
and Bishwamoy Roy
and Yifan Yang
and Akshay Bhagat
and David Butterworth
and Andrew J. Eick
and Alok Sharma
and Junqing Wei},
title = {Systems and Methods for Sensor Calibration},
year = {WIPO Patent WO 2020/121096 A1, June 2020},
url = {https://patents.google.com/patent/WO2020121096A1/en},
}
@misc{patent_US11443524_B2,
author = {Mauro Aguiar
and Noam Weinstein
and Eric Wolff
and Matthias Sapuan
and Hsun-Hsien Chang
and Philipp Robbel
and Maurilio Di Cicco
and Guchan Ozbilgin
and Bishwamoy Sinha Roy
and Yifan Yang
and Akshay Bhagat
and David Butterworth
and Andrew J. Eick
and Alok Sharma
and Junqing Wei},
title = {Systems and Methods for Validating Sensor Calibration},
year = {US Patent 11,443,524 B2, September 2022},
url = {https://patents.google.com/patent/US11443524B2/en},
}
@InBook{haynes_springer2018,
title = {Developing a Robust Disaster Response Robot: CHIMP and the Robotics Challenge},
author = {G. Clark Haynes
and David Stager
and Anthony Stentz
and J. Michael Vande Weghe
and Brian Zajac
and Herman Herman
and Alonzo Kelly
and Eric Meyhofer
and Dean Anderson
and Dane Bennington
and Jordan Brindza
and David Butterworth
and Chris Dellin
and Michael George
and Jose Gonzalez-Mora
and Morgan Jones
and Prathamesh Kini
and Michel Laverne
and Nick Letwin
and Eric Perko
and Chris Pinkston
and David Rice
and Justin Scheifflee
and Kyle Strabala
and Mark Waldbaum
and Randy Warner},
booktitle = {The DARPA Robotics Challenge Finals: Humanoid Robots To The Rescue},
series = {Springer Tracts in Advanced Robotics (STAR)},
volume = {121},
month = {April},
year = {2018},
pages = {103--144},
editor = {Matthew Spenko
and Stephen Buerger
and Karl Iagnemma},
publisher = {Springer International Publishing},
address = {Cham, Switzerland},
isbn = {978-3-319-74666-1},
doi = {10.1007/978-3-319-74666-1_4},
url = {https://www.springer.com/de/book/9783319746654},
abstract = {CHIMP, the CMU Highly Intelligent Mobile Platform, is a humanoid robot capable
of executing complex tasks in dangerous, degraded, human-engineered environments, such as those
found in disaster response scenarios. CHIMP is uniquely designed for mobile manipulation in
challenging environments, as the robot performs manipulation tasks using an upright posture,
yet it uses more stable prostrate postures for mobility through difficult terrain.
In this paper, we report on the improvements made to CHIMP—both in its mechanical design and
its software systems—in preparation for the DARPA Robotics Challenge Finals in June 2015.
These include details on CHIMP’s novel mechanical design, actuation systems, robust construction,
all-terrain mobility, supervised autonomy approach, and unique user interfaces utilized for
the challenge. Additionally, we provide an overview of CHIMP’s performance, and we detail the
various lessons learned over the course of the challenge.
CHIMP was one of the winners of the DARPA Robotics Challenge, completing all tasks and finishing
in 3rd place out of 23 teams. Notably, CHIMP was the only robot to stand back up after accidentally
falling over, a testament to the robustness engineered into the robot and a remote operator’s
ability to execute complex tasks using a highly capable robot. We present CHIMP as a concrete
engineering example of a successful disaster response robot.},
}
@Article{haynes_jfr2017,
title = {Developing a Robust Disaster Response Robot: CHIMP and the Robotics Challenge},
author = {G. Clark Haynes
and David Stager
and Anthony Stentz
and J. Michael Vande Weghe
and Brian Zajac
and Herman Herman
and Alonzo Kelly
and Eric Meyhofer
and Dean Anderson
and Dane Bennington
and Jordan Brindza
and David Butterworth
and Chris Dellin
and Michael George
and Jose Gonzalez-Mora
and Morgan Jones
and Prathamesh Kini
and Michel Laverne
and Nick Letwin
and Eric Perko
and Chris Pinkston
and David Rice
and Justin Scheifflee
and Kyle Strabala
and Mark Waldbaum
and Randy Warner},
journal = {Journal of Field Robotics},
volume = {34},
number = {2},
month = {March},
year = {2017},
pages = {281--304},
doi = {10.1002/rob.21696},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1002/rob.21696},
abstract = {CHIMP, the CMU Highly Intelligent Mobile Platform, is a humanoid robot capable
of executing complex tasks in dangerous, degraded, human-engineered environments, such as
those found in disaster response scenarios. CHIMP is uniquely designed for mobile manipulation
in challenging environments, as the robot performs manipulation tasks using an upright posture,
yet it uses more stable prostrate postures for mobility through difficult terrain.
In this paper, we report on the improvements made to CHIMP — both in its mechanical design and its
software systems — in preparation for the DARPA Robotics Challenge Finals in June 2015. These
include details on CHIMP’s novel mechanical design, actuation systems, robust construction,
all-terrain mobility, supervised autonomy approach, and unique user interfaces utilized for the
challenge. Additionally, we provide an overview of CHIMP’s performance, and we detail the various
lessons learned over the course of the challenge.
CHIMP was one of the winners of the DARPA Robotics Challenge, completing all tasks and finishing
in 3rd place out of 23 teams. Notably, CHIMP was the only robot to stand back up after accidentally
falling over, a testament to the robustness engineered into the robot and a remote operator’s ability
to execute complex tasks using a highly capable robot. We present CHIMP as a concrete engineering
example of a successful disaster response robot.},
}
@InProceedings{srinivasa_iser2016,
title = {A System for Multi-step Mobile Manipulation: Architecture, Algorithms, and Experiments},
author = {Siddhartha S. Srinivasa
and Aaron M. Johnson
and Gilwoo Lee
and Michael C. Koval
and Shushman Choudhury
and Jennifer E. King
and Christopher M. Dellin
and Matthew Harding
and David T. Butterworth
and Prasanna Velagapudi
and Allison Thackston},
booktitle = {International Symposium on Experimental Robotics},
address = {Tokyo, Japan},
month = {October},
year = {2016},
pages = {254--265},
editor = {Dana Kuli{'{c}}
and Yoshihiko Nakamura
and Oussama Khatib
and Gentiane Venture},
publisher = {Springer International Publishing},
isbn = {978-3-319-50115-4},
abstract = {Household manipulation presents a challenge to robots because it requires perceiving a
variety of objects, planning multi-step motions, and recovering from failure. This paper presents
practical techniques that improve performance in these areas by considering the complete system in the
context of this specific domain. We validate these techniques on a table-clearing task that involves
loading objects into a tray and transporting it. The results show that these techniques improve success
rate and task completion time by incorporating expected realworld performance into the system design.},
}
@InProceedings{butterworth_acra2013,
title = {Predictably un-predictable — on the implementation of a Walking Pattern Generator
for the full-sized humanoid robot HUBO2 using Model Predictive Control},
author = {David T. Butterworth
and Boon Siew Han
and Surya P. N. Singh},
booktitle = {Australasian Conference on Robotics and Automation (ACRA)},
address = {Sydney, Australia},
month = {December},
year = {2013},
abstract = {There is a large body of research related to WPG (Walking Pattern Generators) for
humanoid robots. Typically WPG are evaluated based on how well the robot’s actual ZMP (Zero Moment Point)
tracks the desired ZMP trajectory, using a simulation of a rigid-body robot walking on a solid floor.
However little has been written about how various approaches scale-up to a full-sized humanoid robot, which
has unmodeled compliance in the joints or contact surfaces, and makes contact with non-rigid surfaces in the
environment like a soft floor. This paper compares the implementation of three WPG: Parametrized Polynomials,
Preview Control and MPC (Model Predictive Control), and shows results from simulation and initial testing
on the 1.25m tall humanoid robot HUBO2.},
}
@InProceedings{butterworth_rie2012,
title = {Teaching C/C++ programming with Lego Mindstorms},
author = {David T. Butterworth},
booktitle = {3rd International Conference on Robotics in Education (RIE)},
address = {Prague, Czech Republic},
month = {September},
year = {2012},
editor = {David Obdr{v{z}}{'{a}}lek},
abstract = {Computer programming is a skill required in many professions, not just
computer science. Lego Mindstorms NXT can be incorporated into a programming course to
add hands-on interactivity that will better engage a broader range of students.
Chosing the most suitable programming language is difficult, and this paper summarizes
some experiences in teaching students using RoboLab and NXT-G for Mindstorms NXT.
The text-based language RobotC is recommended for beginner and intermediate level courses,
and various code examples are provided to assist teachers in building lesson plans.
It is suggested that advanced programming should be taught in C++, and an example of
using the NXT++ library to control a robot arm is presented. Teaching all levels of
programming, using robotics, is more enticing and stimulating for students, and teachers
can justify the purchase of expensive robot hardware by employing it in multiple areas
of the school curriculum.},
}
@MastersThesis{butterworth_thesis2017,
title = {A Fast & Efficient Mission Planner for Multi-rotor Aerial Vehicles in Large, High-resolution Maps of Cluttered Environments},
author = {David T. Butterworth},
month = {May},
year = {2017},
school = {Robotics Institute, Carnegie Mellon University},
address = {Pittsburgh, United States},
number = {CMU-RI-TR-17-07},
abstract = {Autonomous multi-rotor aerial vehicles have many potential
applications in urban environments, such as inspecting infrastructure, creating
3D maps from the air, or delivering packages. However this involves flying close
to obstacles like trees and buildings, or flying under overhanging structures
like bridges, powerlines and doorways. Flying safely in environments like this
will require perception and planning with respect to a full 3D world model.
Recent work has demonstrated that multi-rotor UAVs can robustly localize to
static point cloud maps of urban environments using LiDAR- and VO-based methods.
However it is difficult to plan directly in large 3D maps due to the memory
requirements and size of the state space. We investigate the problem of planning
paths in large high-resolution point clouds, for missions that include flying
around obstacles and under overhanging structures.
Our approach is to plan offline a complete global mission path in the static
map, that is collision-free and satisfies altitude constraints. We use a
random-sample based planning algorithm to find approximate shortest paths, with
rejection-sampling to satisfy constraints. We also introduce a novel approach
for avoiding obstacles that may appear on the mission path by pre-planning
a network of alternative paths.
We present results showing a comparison of various path planning algorithms
and choose BIT* because it finds the approximate shortest path in the fastest
time. For planning alternative paths, we use geometric path primitives based
on splines or revert to BIT*. We also compare various data structures for
storing the 3D world representation and use a sparse Octree to store occupied
voxels because it offers the best trade-off between storage memory and
collision-checking speed. We present qualitative results showing the
resulting mission paths for multiple environments, including an industrial
site and a tree-filled area.},
}
@Bachelorsthesis{butterworth_thesis2013,
title = {Implementation of Walking Pattern Generator and Stability Analysis for Biped Robot Walking on Deformable Surface},
author = {David T. Butterworth},
month = {November},
year = {2013},
school = {University of Queensland},
address = {Brisbane, Australia},
abstract = {Previous research has demonstrated that position-controlled biped robots
can walk on rigid surfaces that are flat, lightly sloped or of uneven height. Typically
the robot is assumed to be a perfectly rigid kinematic chain and that foot contact is
parallel to the floor for ZMP walking methods. It is possible to compensate for a small
amount of compliance using feedback control and indeed having some compliance in the
ankle and foot can help to damp out vibration. However, too much ankle compliance makes
the rigid-body biped uncontrollable and too much deformation in the floor destabilizes
the walking gait. This thesis shows that when the robot walks on a deformable surface
the destabilizing effect is comparable to the effect of the robot being pushed, which
both induce a tipping moment around the edge of the foot. Because the robot is rigid
with a floating base, both cases show lateral and/or fore-aft oscillations about the
foot, the difference being that the deformable floor induces some twist on the landing
foot. This leads to the useful conclusion that existing methods for push recovery on
rigid surfaces may be applicable to walking on a deformable floor, however because
parallel foot contact can not be assumed then additional controllers must be developed
to ensure the foot remains in contact with the non-rigid floor.},
}
@InProceedings{zhang_iros2018,
title = {P-CAP: Pre-computed Alternative Paths to Enable Aggressive Aerial Maneuvers in Cluttered Environments},
author = {Ji Zhang
and Rushat Gupta Chadha
and Vivek Velivela
and Sanjiv Singh},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
address = {Prague, Czech Republic},
month = {October},
year = {2018},
pages = {8456--8463},
abstract = {We propose a novel method to enable fast autonomous flight in cluttered environments.
Typically, autonomous navigation through a complex environment requires a continuous heuristic search
on a graph generated by a k-connected grid or a probabilistic scheme. As the vehicle progresses, modification
of the graph with data from onboard sensors is expensive as is search on the graph, especially if the paths
must be kino-dynamically feasible. We suggest that computation needed to find safe paths during fast flight
can be greatly reduced if we precompute and carefully arrange a dense set of alternative paths before the flight.
Any prior map information can be used to prune the alternative paths to come up with a data structure that enables
very fast online computation to deal with obstacles that are not on the map but only detected by onboard sensors.
To test this idea, we have conducted a large number of flight experiments in structured (large industrial facilities)
and unstructured (forests-like) environments. We show that even in the most unstructured environments, this method
enables flight at a speed up to 10m/s while avoiding obstacles detected from onboard sensors.},
}
@InProceedings{zhang_fsr2019,
title = {P-CAL: Pre-computed Alternative Lanes for Aggressive Aerial Collision Avoidance},
author = {Ji Zhang
and Rushat Gupta Chadha
and Vivek Velivela
and Sanjiv Singh},
booktitle = {12th International Conference on Field and Service Robotics (FSR)},
address = {Tokyo, Japan},
month = {August},
year = {2019},
abstract = {We here address the issue of air vehicles flying autonomously at a highspeed in
complex environments. Typically, autonomous navigation through a complex environment requires a
continuous heuristic search on a graph generated by a k-connected grid or a probabilistic scheme.
The process is expensive especially if the paths must be kino-dynamically feasible. Aimed at
tackling the problem from adifferent angle, we consider the case that the environment is mostly
known from aprior map. The proposed method suggests the computation needed to find safe paths during
fast flight can be greatly reduced if we pre-compute and carefully arrange a set of alternative paths
before the flight. During the navigation, the vehicle selects a pre-computed path to navigate without
the need to generate a new path. The result is that majority of the processing is migrated to offline
path generation. Effectively, the onboard computation is significantly reduced, taking < 3% of a CPU
thread on a modern embedded computer. In experiments, it enables a lightweight aerial vehicle to
maneuver aggressively through a cluttered forest environment at 10 m/s.},
}