As part of various projects I’ve had to implement solutions for robot sensor calibration.
This includes intrinsic and extrinsic camera calibration, aligning multiple sensors co-located on a robot, or computing the offset between multiple sensors looking at the same scene.
Assembling a full-size humanoid robot, including the aluminum frame, actuators, and routing all the wiring. Conducting repairs including testing and replacing electronic boards and Harmonic Drive reducers.
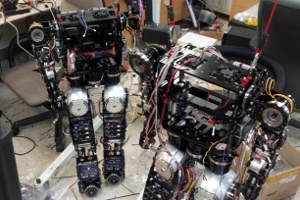
Upgrades to Mobile Manipulator Robot
Fig. 3: Proposed design and upgraded robot.
A trade study to upgrade the head, neck and mobile base of a robot called HERB at CMU. This included researching and comparing off-the-shelf products, developing design mock-ups and analyzing the expected capability of the improved system.
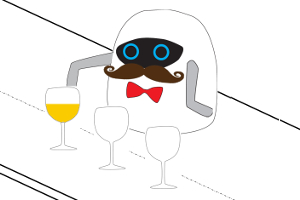
A social robot that can pour you a drink. It is designed to provide a fun, interactive drinking experience that includes games and personalized service.
This was a team project with C. K. Jung, K. Oh and Y. Kim.
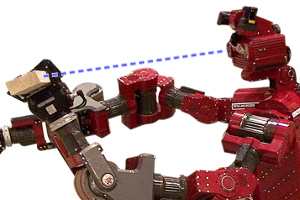
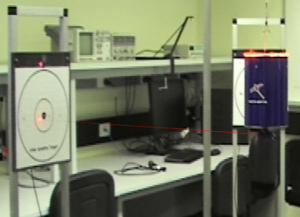
Working model of a Defense Satellite
Fig. 5: The satellite fires a laser at the target.
This project was to design, build and demonstrate a single-axis working model of a space satellite, that can detect and mark targets using a low-power laser. The final design is a tightly-integrated mechatronic system for which the development required multidisciplinary knowledge of electronics, mechanical design and computer software.
The following page includes videos of the Satellite in action and a detailed description of the design and manufacturing process: Click here to read more
This was a team project undertaken in 2011 with S. Hinton, J. Jangam and K. Lawson.
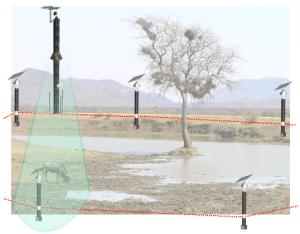
Wildlife Surveillance System
Fig. 6: The system detects a wild animal.
Scientists need to monitor and count wildlife in remote areas for conservation purposes. Similarly, farmers and land owners need to detect the presence of “feral” or invasive animals in order to develop a management plan. This project was the design of an electronic surveillance system for detecting and recognizing animals in remote areas.
This was a team project undertaken in 2010 with M. Manitta, S. Otte, E. Peng and A. Chi.
Reverse-engineering of Snow Making System
Fig. 7: A fan-gun producing artificial snow.
A ski resort had an aging snow-making system that was starting to have some reliability issues and was no longer supported by the manufacturer. Each fangun has a program written in assembly language, running on a 8051 Microcontroller with a UV-erasable memory chip. I was able to to reverse engineer the program, test the system’s behaviour and make some modifications.