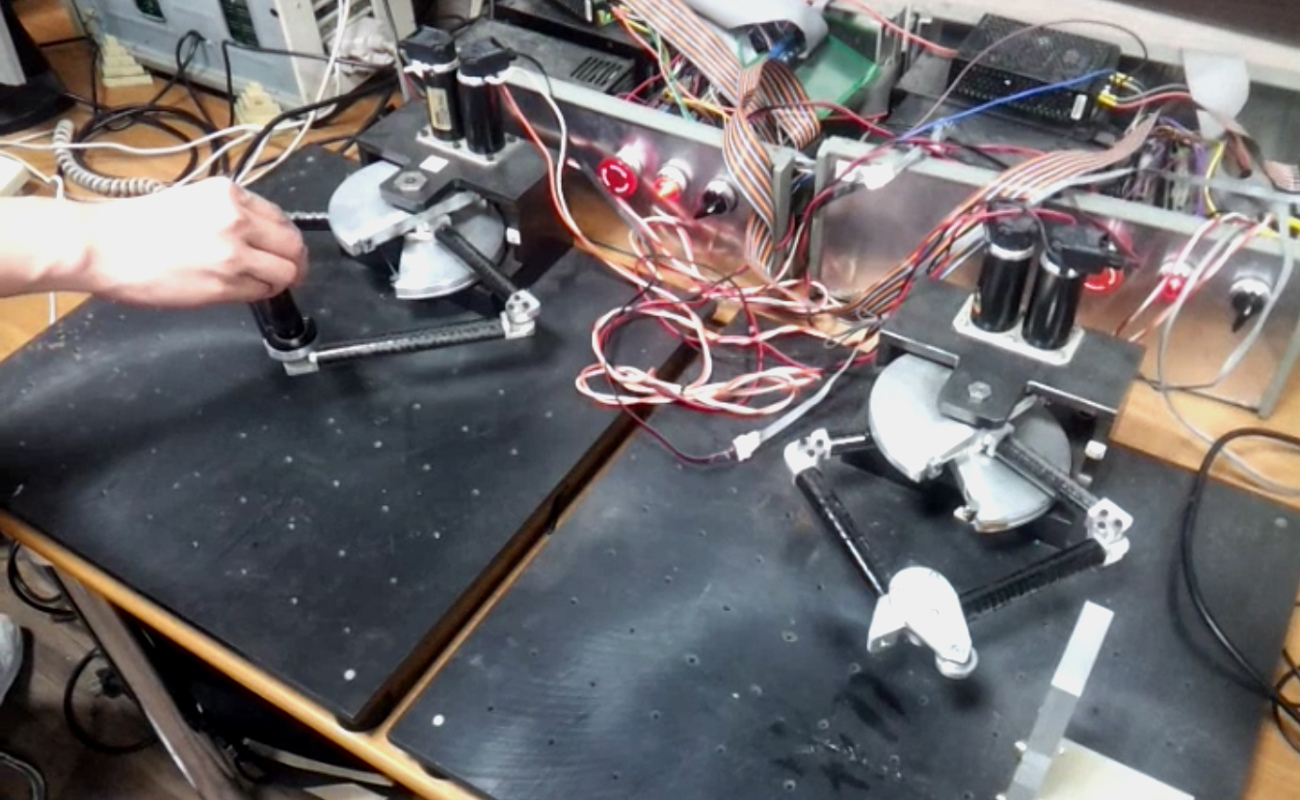
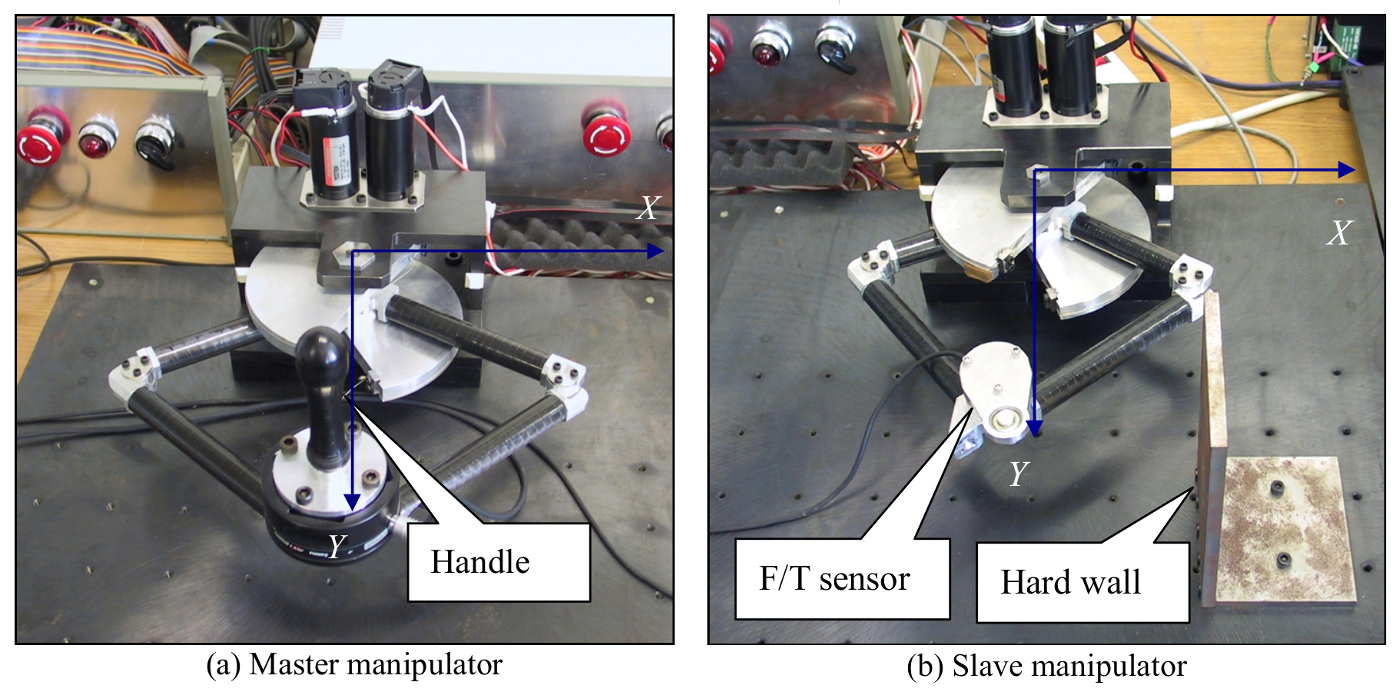
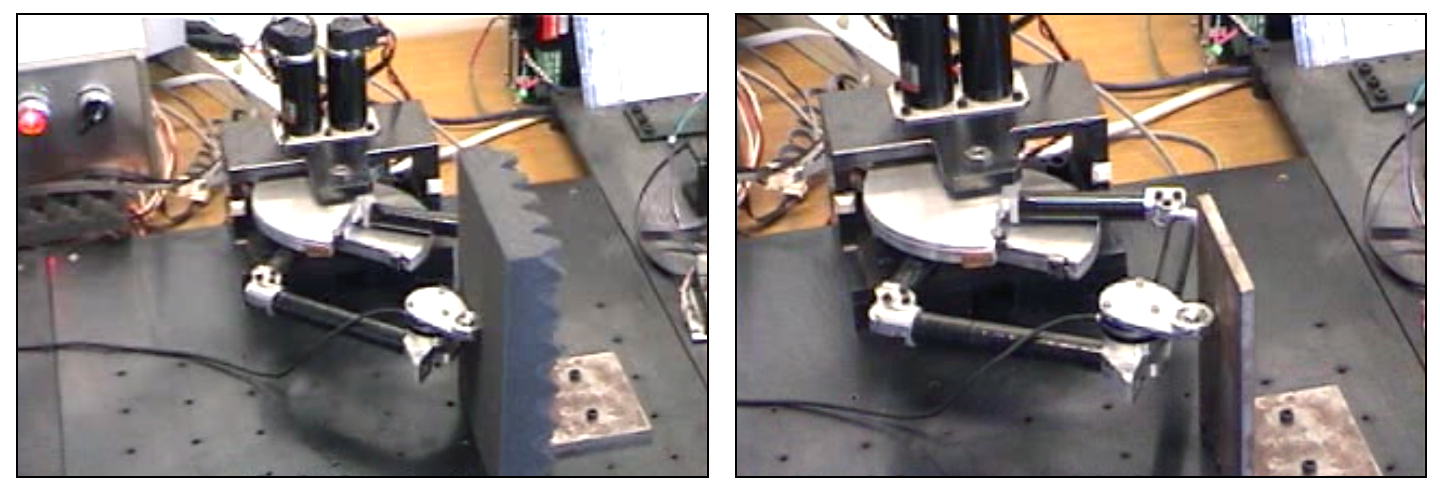
This project was to implement a bilateral control algorithm for a tele-robotics system with a haptic interface. The system comprises a pair of 2-DOF planar manipulators, each being a 5-bar parallel linkage (Fig. 1-2). The two axes are backdrivable, utilizing cable-driven transmissions with Maxon motors and HEDS encoders.
The two mechanisms operate in a master-slave configuration. The “master” device has a handle that the operator uses to move the linkage. Any movements are duplicated in real-time by the “slave” device, which would normally be located in a different location to the operator. The slave manipulator has a round protrusion on the end of the linkage so that it can push or slide over surfaces in the environment.
 |
 |
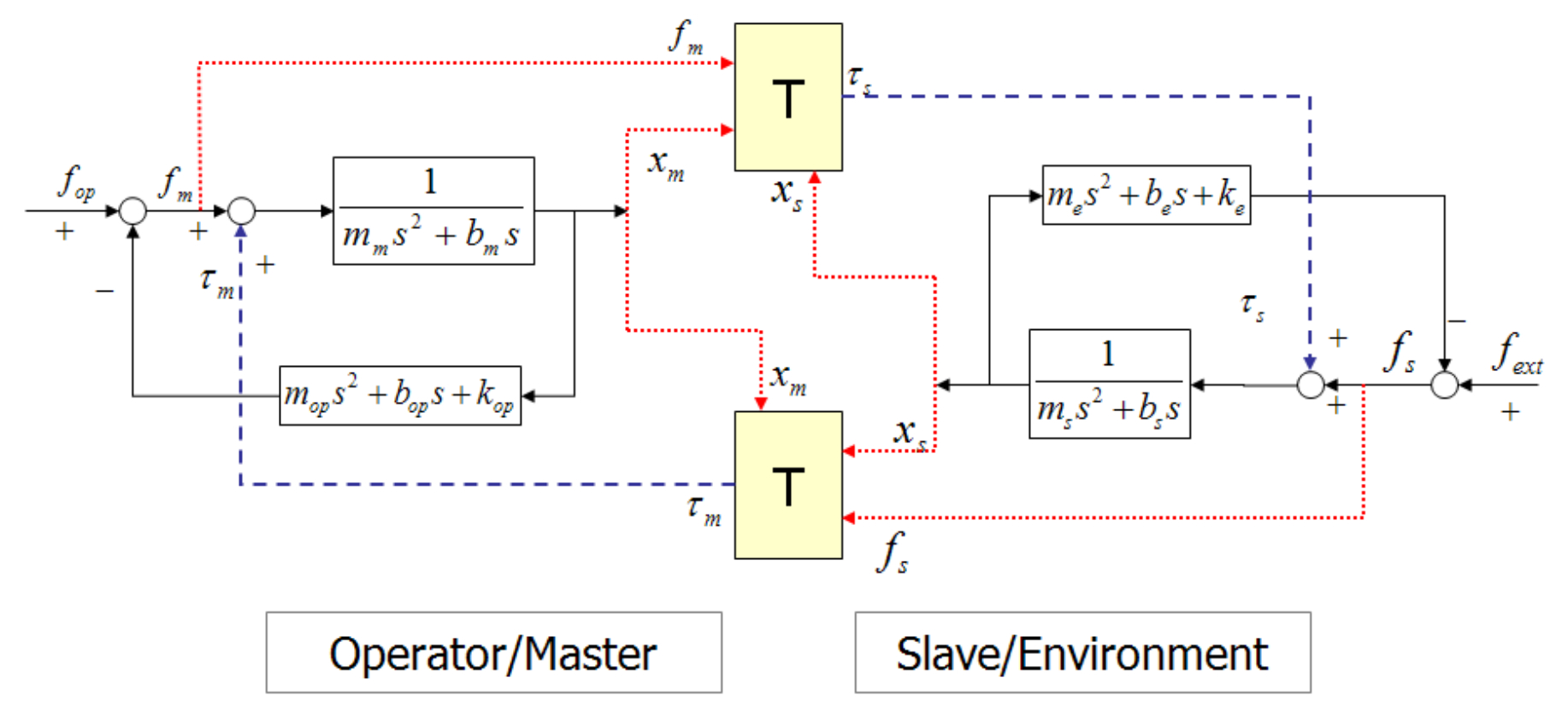 |
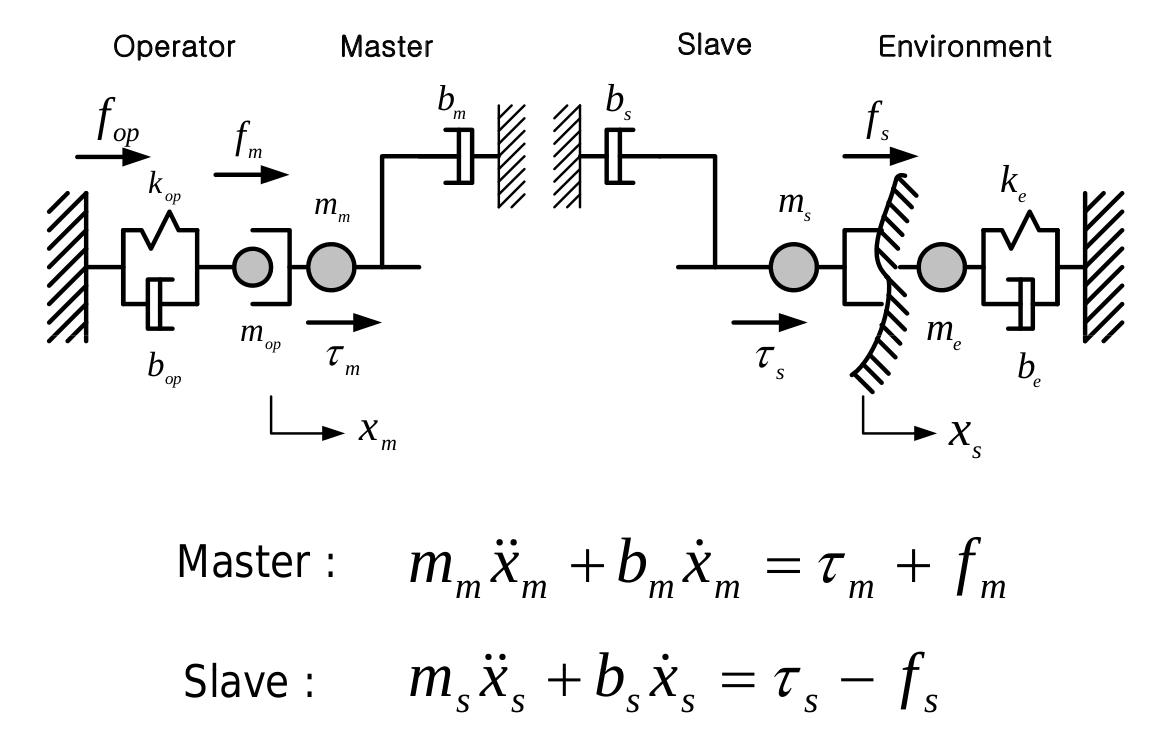
The dynamics model for the master and slave arms is shown in Fig. 3 and is based on worked by Yokokohji and Yoshikawa [1]. A generalized diagram of the bilateral control architecture (Fig. 4) can be derived by taking the Laplace transform of the system dynamics. The dual controllers are shown by the block “T”, which means that the state of the slave is passed through the system dynamics and gives feedback to the master controller.
In this experiment we used a PD (Proportional Derivative) controller because fast response is more important than compensation for steady-state error. We implemented a position-force controller that combines PD control with feedback of the force value from the slave.
Results:
Various experiments were performed. You can see how the system works in the video below.
 |
 |
|
|
 |
The performance of the bilateral controller was tested by pushing and sliding the slave manipulator against different types of surfaces, including soft closed-cell foam and a hard steel plate (Fig. 5).
The system tracking performance was compared by measuring the position error between the master and slave actuators. Fig. 6 shows a plot from one experiment using gains of Kp = 1500, Kd = 5. The position is in meters relative to the starting position of the master controller.
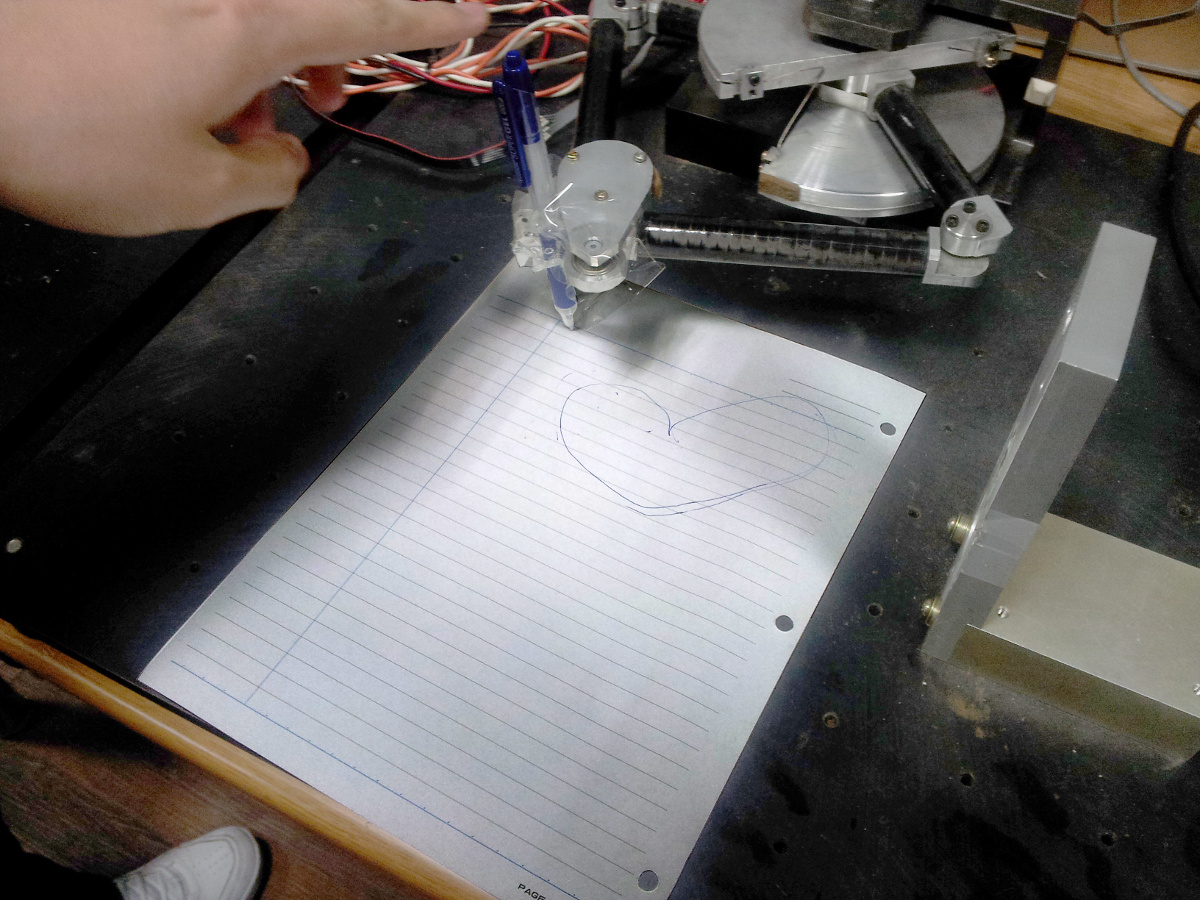
We also attached a pen to the slave mechanism in order to qualitatively determine the operator’s ability to perform a drawing task (Fig. 7).
This work was undertaken with C. K. Jung & T. J. Kim.
| References: |
|
[1] Y. Yokokohji and T. Yoshikawa, “Bilateral Control of Master-slave Manipulators for Ideal Kinesthetic Coupling – Formulation and Experiment”, in IEEE Transactions on Robotics and Automation, Vol. 10, No. 5, 1994.
|
|
[2] J-H Ryu, D-S Kwon and B. Hannaford, “Stable Teleoperation with Time Domain Passivity Control”, in Proceedings of IEEE International Conference on Robotics and Automation (ICRA), 2002.
|