One method for localizing a mobile robot is to use an omnidirectional (or spherical) camera and try to detect familiar features within the scene. This method is robust over extended periods because the wide viewing angle means that each image frame will likely include some known features from a pre-recorded map, and the fact that visual features on the walls or ceiling are less likely to be moved or occluded.
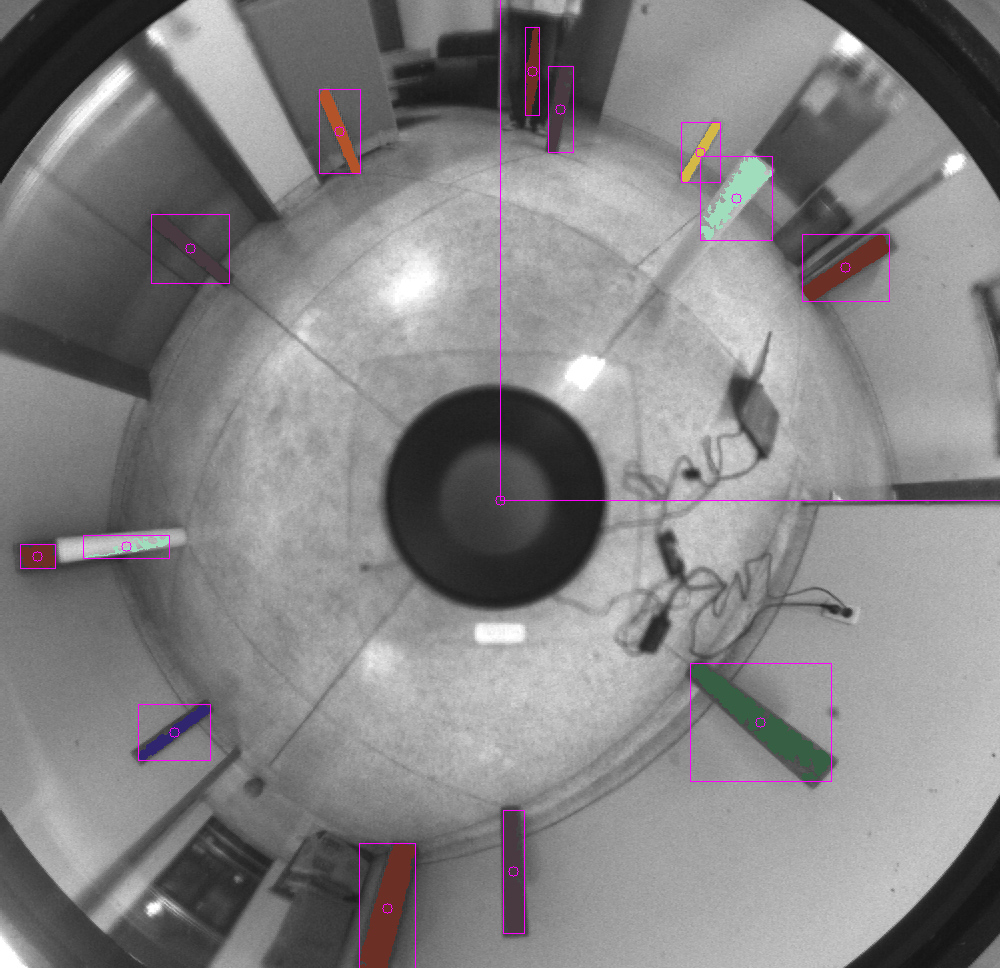
In this project I developed a prototype localization system using colored poles as distinct features. Each image frame is corrected and transformed to the HSV color space and simple color-based blob detection is used to find the landmarks. For testing purposes, the environment map was drawn by-hand and the angle and distance of each landmark is computed and transformed into the robot’s coordinate frame. Feature association is performed using SVD (Singular Value Decomposition).
This demonstrated the viability of the method and future work is to implement a SLAM algorithm, for better robustness against landmarks that are moved or missing.
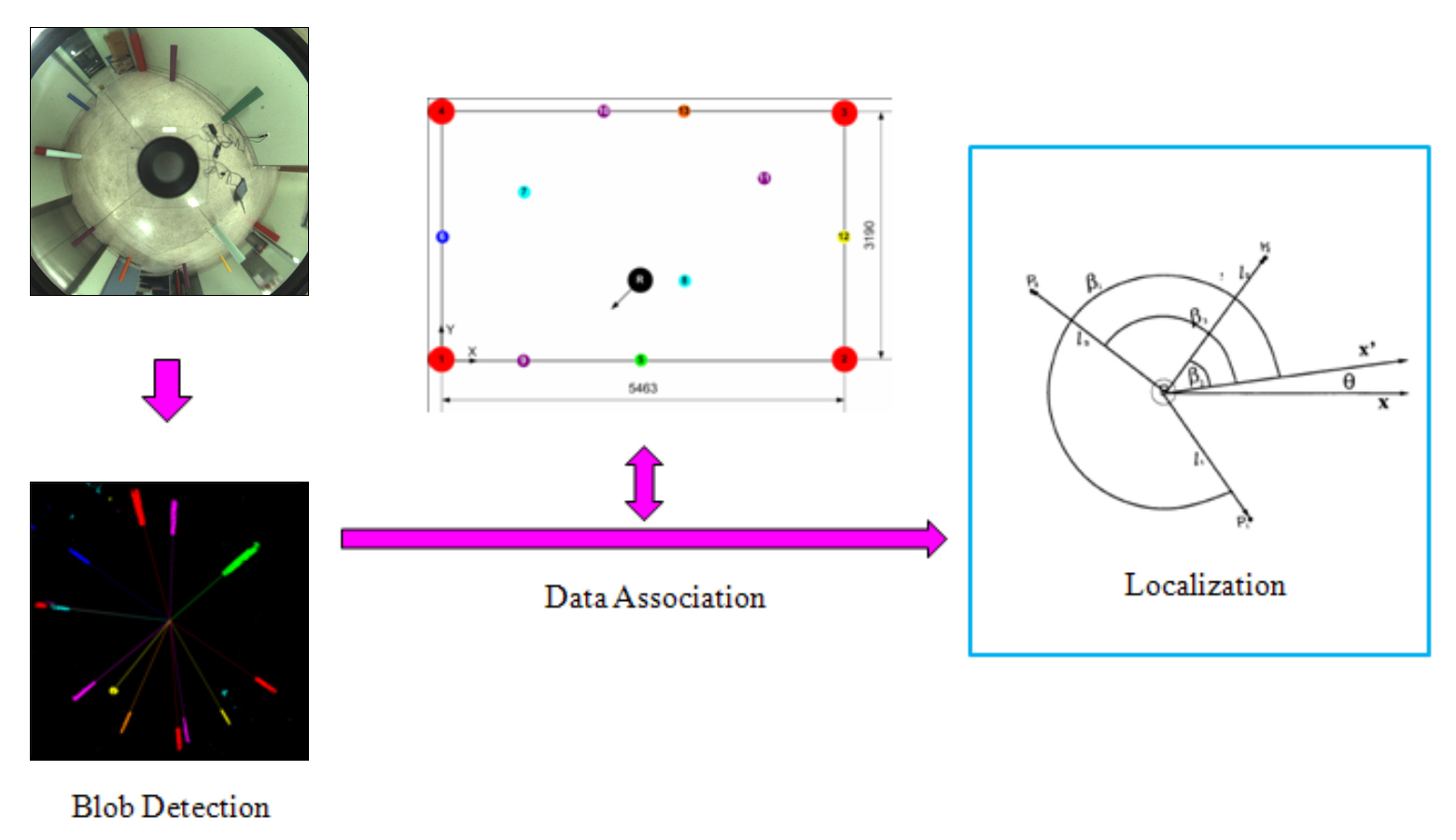 (1) Image acquisition, undistort, convert to greyscale. (2) Color thresholding, segmentation. (3) Data association . (4) Localization. |
 |