
This system enables an airship (“blimp”) to autonomously fly in a loop, within eye-sight of a ground station. The airship’s position is detected and tracked using a computer vision, and control commands are sent via radio signal from the Base Station.
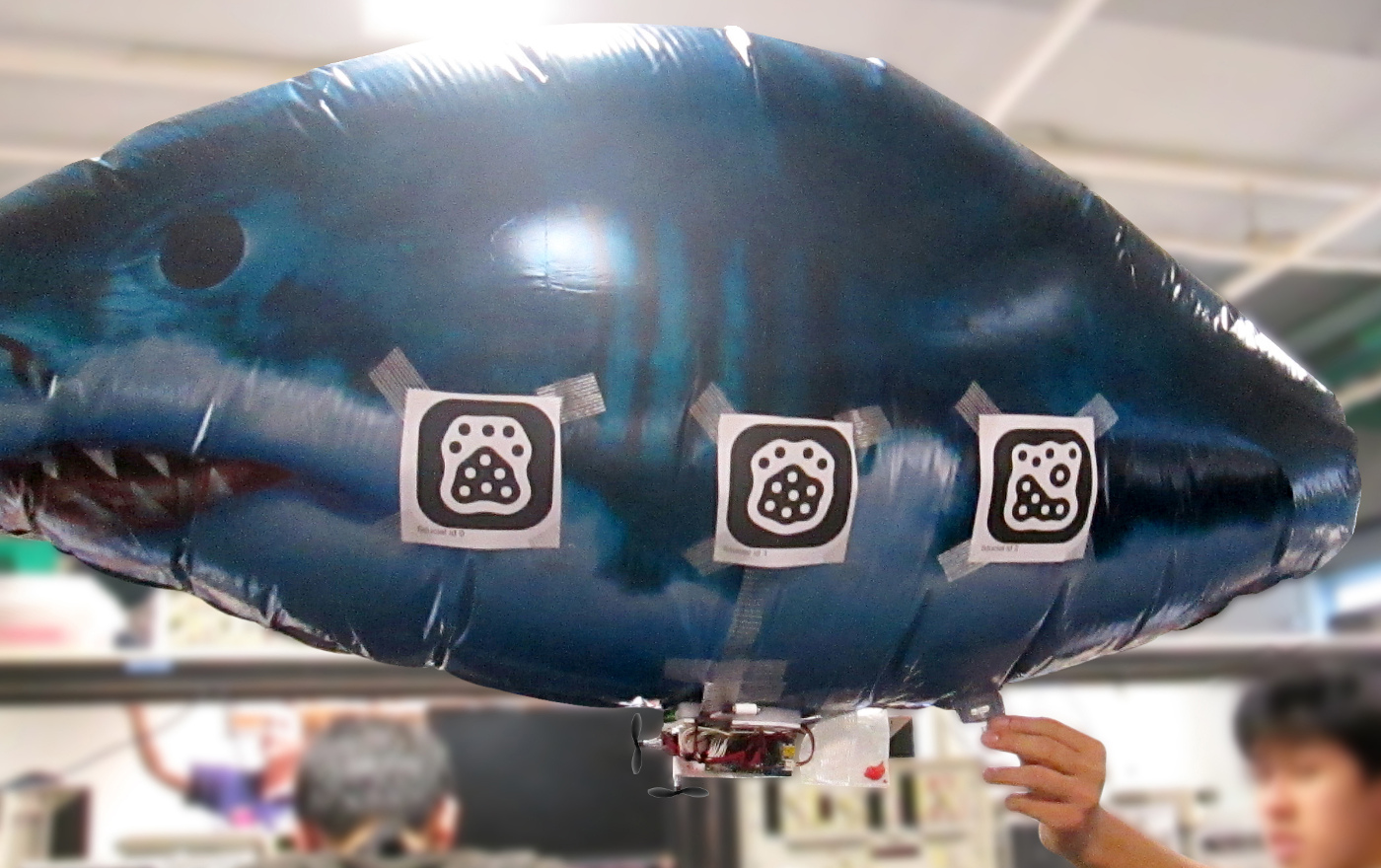
The blimp was modeled using a toy inflatable balloon manufactured by Air Swimmers, which is 1.1 meters long and filled with high-concentration helium. It has two small plastic fan propellors and a rudder, allowing it to adjust altitude up/down or move forwards and turn. Slung under the airship is an Atmel ATmega238 Microcontroller, Nordic nRF24L01 RF Transceiver and a small LiPO battery. The airship is balanced to retain a relatively constant altitude and minor variations are detected using an IR distance sensor pointed downwards.
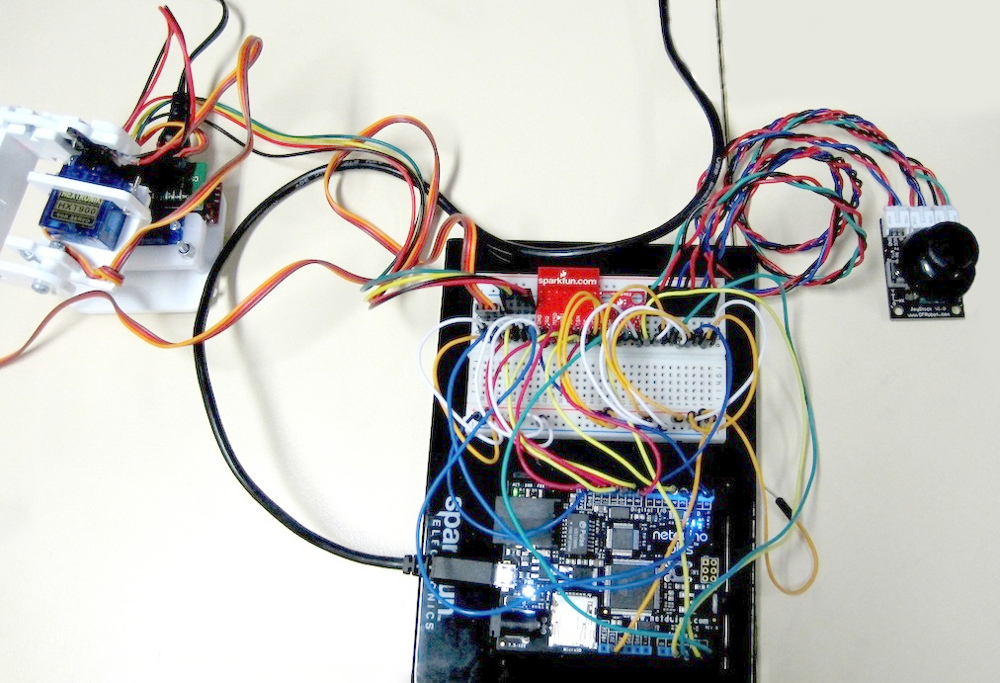
The base station sends control commands to the airship via 2.4 GHz radio signal to control the forward and turning motion. It comprises of a laptop computer, Atmel AT91SAM (ARM v7) Microcontroller, a second Nordic nRF24L01 RF Transceiver, and a pan-tilt camera.
The blimp has fiducial markers on all sides that are tracked using the pan-tilt camera. This mechanism uses two small RC-style servo motors (HXT-900) that are controlled via the microcontroller. The camera is a small Logitech USB webcam that connects to the computer. The computer vision software runs on the computer and sends the marker location via HTTP over an ethernet cable to the microcontroller. The operator enters some parameters into a GUI on the laptop and the system automatically controls the airship to move forward until it reaches 45 degree line-of-sight, then rotate in-place and move in the opposite direction.
|
|
 |
 |
The project concept and the airship’s onboard microcontroller were developed by M. D’Souza at the University of Queensland.