Introduction
Unmanned autonomous robots are currently used in the air, on the ground, and under the sea. They are used for both civil and military purposes, in roles including surveillance, inspection and warfare. However, one area of our world that is currently off-limits to autonomous robots is underneath the earth.
Some potential applications for an autonomous underground robot are:
- External inspection of underground pipes, for gas & water leaks.
- Military surveillance & placement of incendiary charges.
- Lunar soil sampling & mining.
- Sensor placement & seismology.
- Sub-sea anchor placement.
This article summarises the current state of autonomous underground robots, outline the weaknesses of currently available platforms and proposes a new design for an underground burrowing robot.
Literature Review
Underground robots can be classified as those that have some sort of burrowing, digging or tunnelling capability. At the time of writing, a literature search revealed that there are no complete robotic systems capable of autonomous activity underneath the ground. Therefore this literature review includes mechanisms and machines that could potentially become the base for a new autonomous underground robot.
Burrowing mechanisms
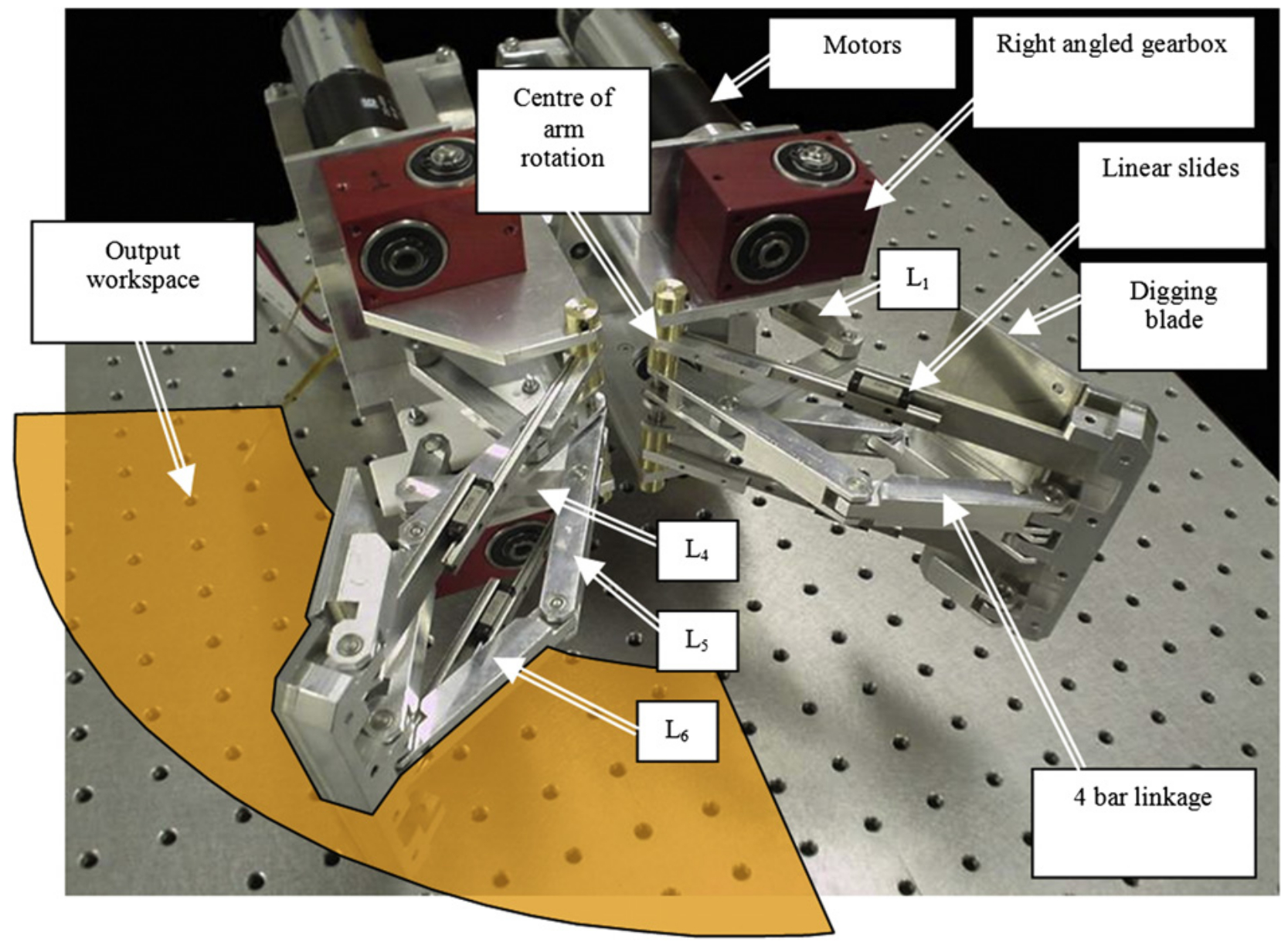
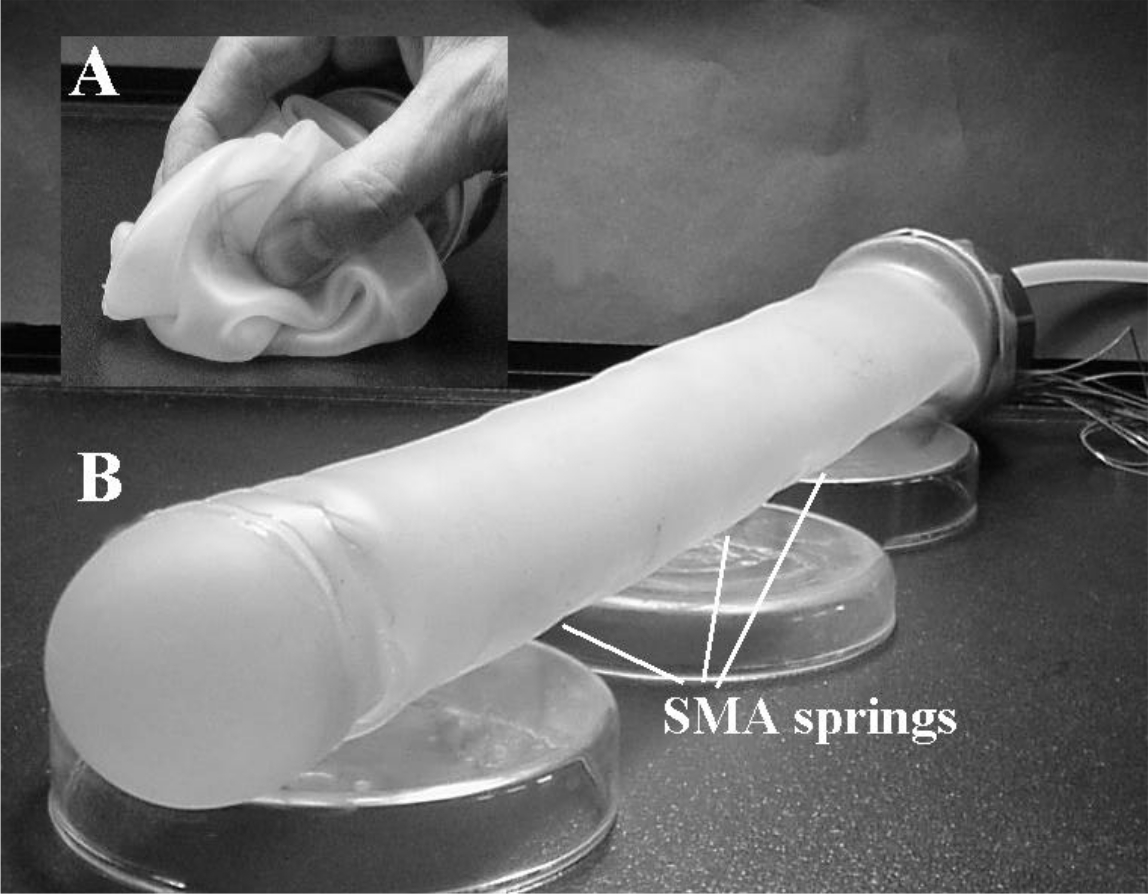
A burrowing robot would be useful for search and rescue (SAR), where it could move through the rubble of a collapsed building to locate survivors. Scott and Richardson looked at the biological design of the mole animal [1] and applied it to the design of a digging robot using a sweeping mechanism [2][3].
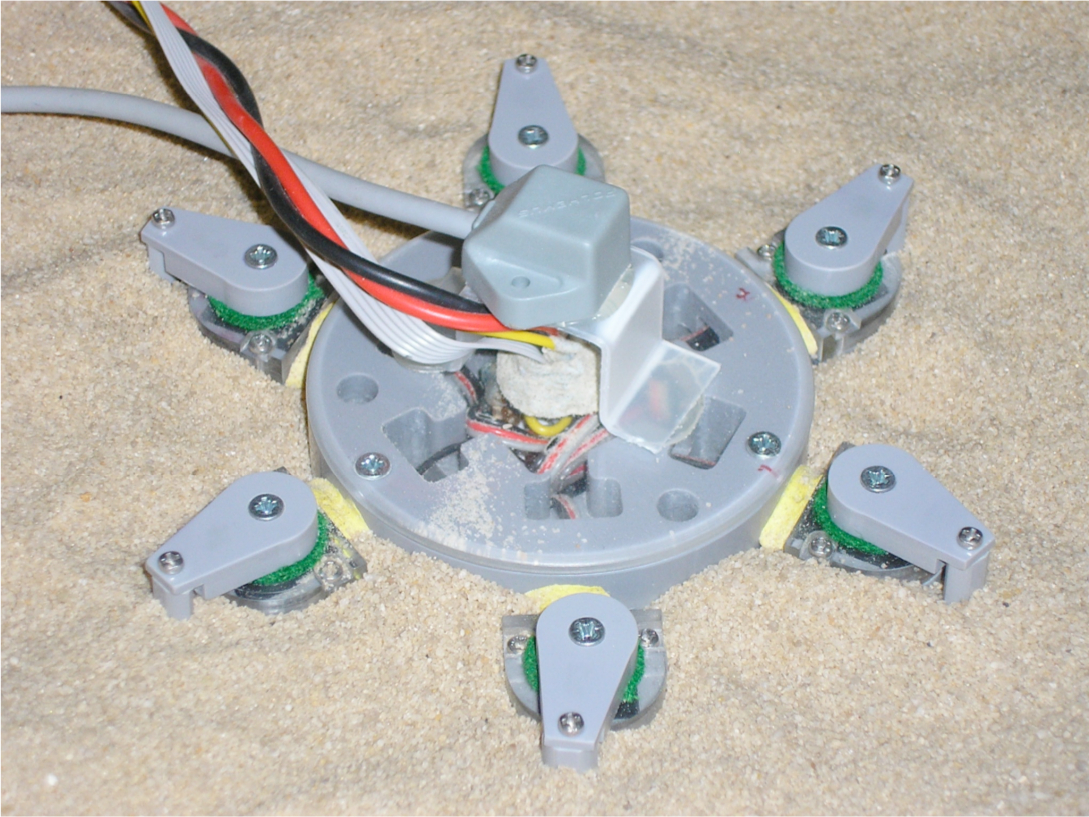
Russell has developed various robot prototypes for sensing of underground chemical leaks, including a design with three flippers for actuation [4], and a newer design utilising six paddle-type actuators that incorporates a sensor capable of detecting underground gas plumes [5].
Biological inspiration
Robot designers often take inspiration from biology and there are many species of burrowing animals, including the Wombat (from Australia) and the Mole (found on multiple continents).

Researchers at Georgia Tech were inspired by a small lizard with a shovel-shaped snout and built a snake-like robot with an actuated digging mechanism at the front [6]. The robot can burrow through granular material and moves the shovel up-and-down to control the pitch.
robot can burrow through sediment [7]
Some robots are designed simply to better study the biology of the animal itself, however these novel mechanisms could potentially lead towards an autonomous underground robot.
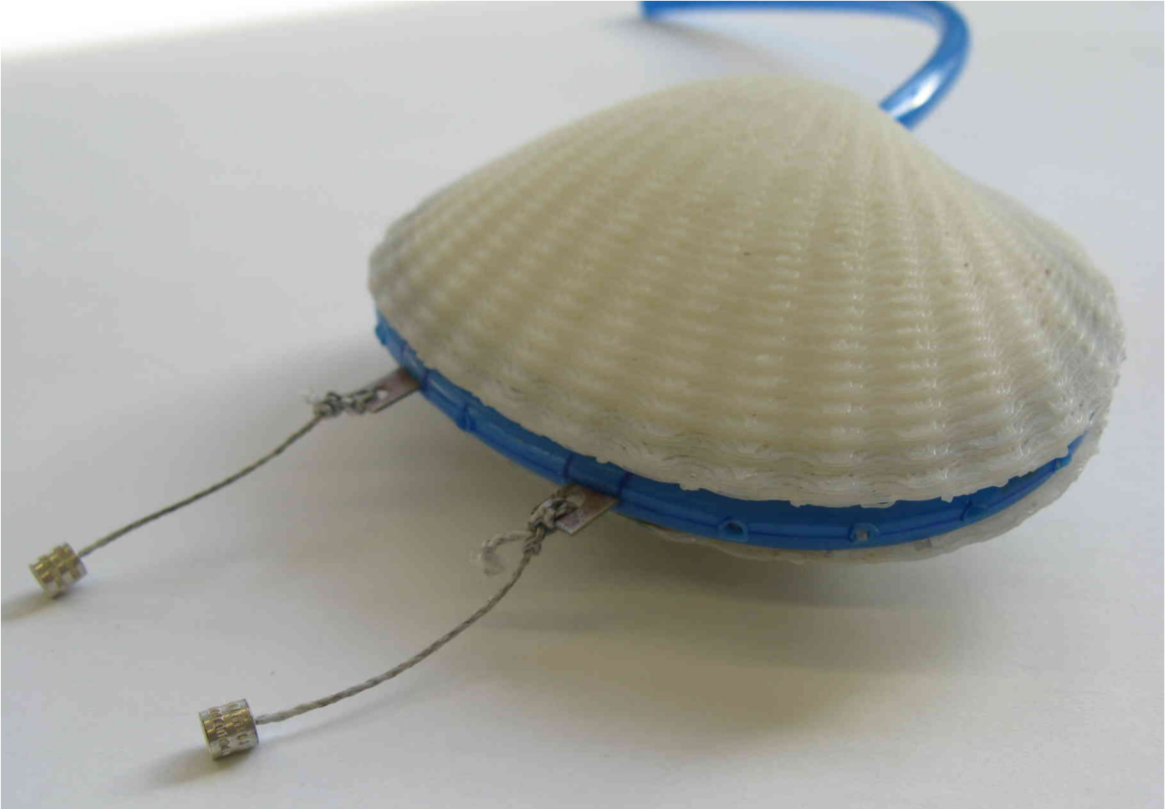
Koller-Hodac et al. built a robotic clam that uses a bi-valve mechanism to pull itself down into sediment [7].
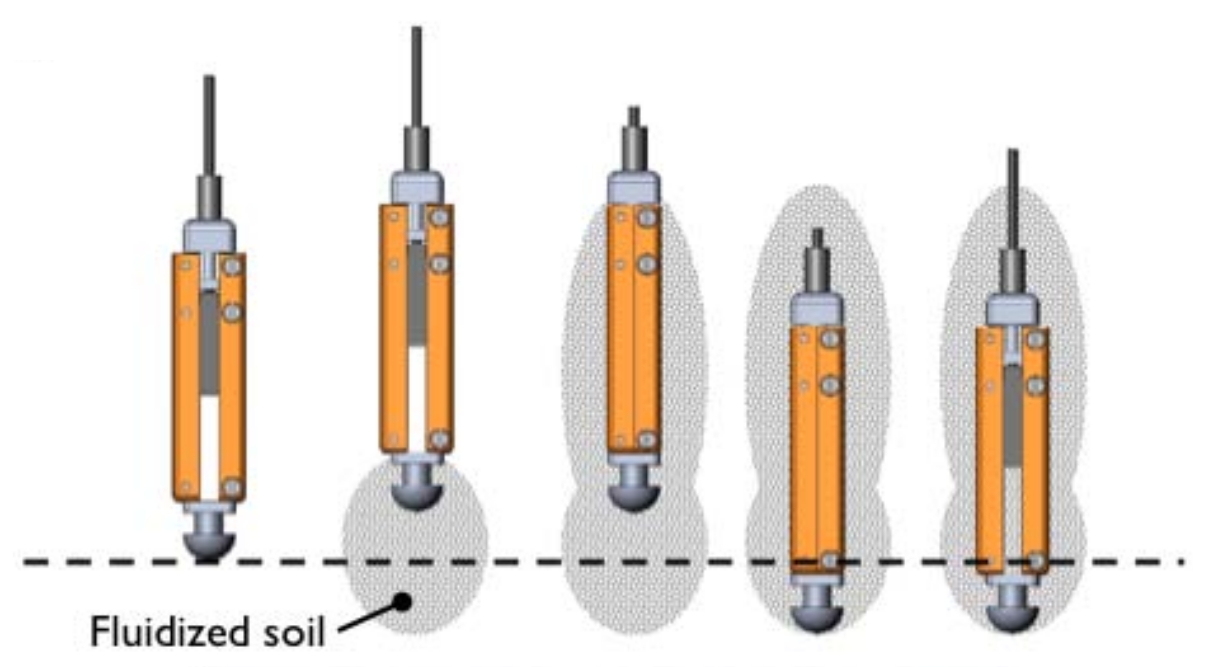
Animals in nature often achieve their key function with high efficiency, such as the razor clam that can burrow into the ocean floor using an extremely low ratio-of-energy per distance travelled. The RoboClam can burrow into sand by liquefying the surrounding area, using a relatively small amount of energy [8].
(A) in collapsed state
(B) in inflated state
Many research groups have built robotic snakes, although the focus is generally towards the redundant, slithering type of locomotion. This compliant, deformable snake robot moves like a caterpillar and could potentially navigate into the crevices between debris after an earthquake, to search for survivors [9].
Mining the planets
Because of the risks and comparatively high-cost of manned missions to space, operations like sub-surface exploration and mining of the planets will most certainly be conducted by robots.
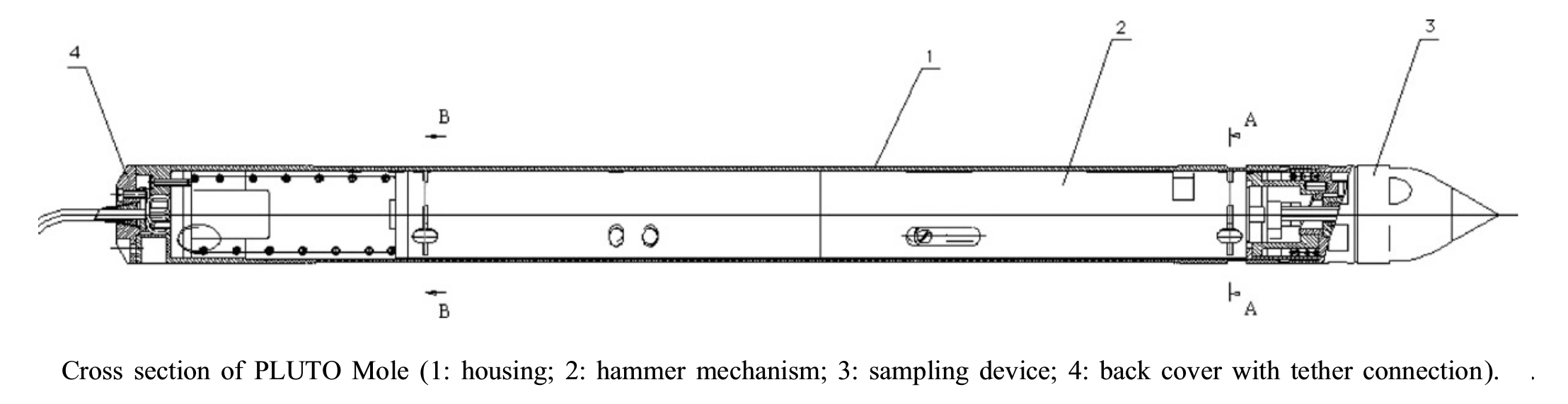
The ill-fated “Beagle 2” Mars Lander carried a soil sampling device that used a sliding hammer mechanism to embed itself into the ground, either vertically or laterally [10].
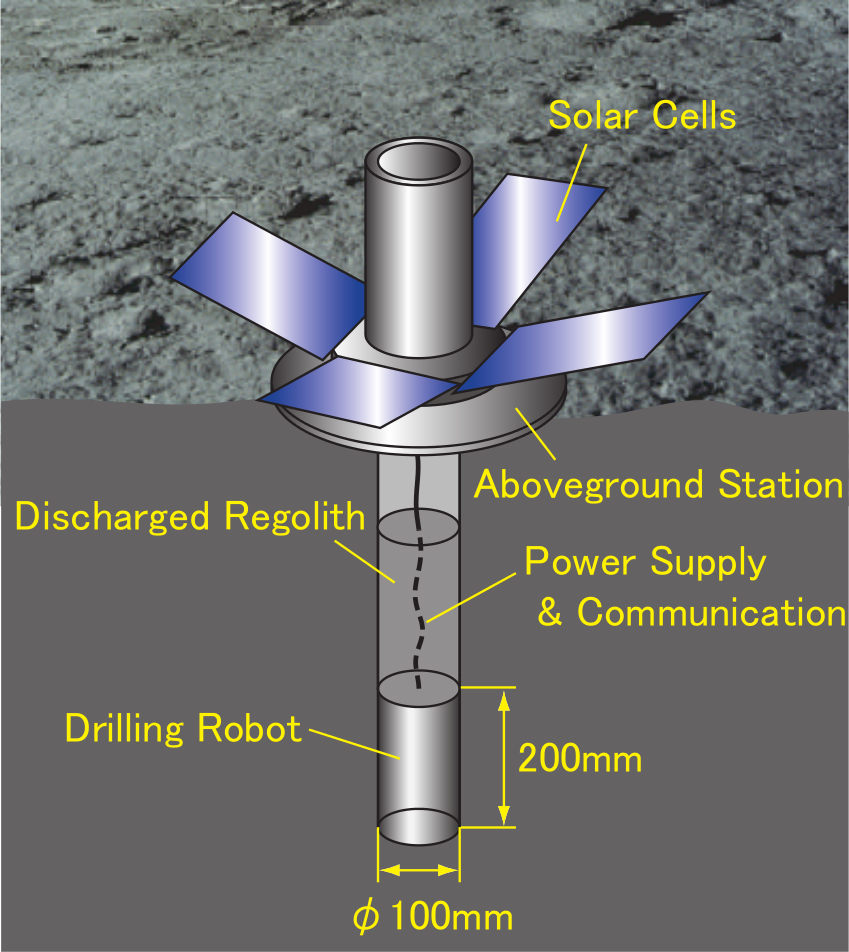
Watanabe et al. designed a robot than can bore vertically into soils like that found on the moon [11]. While such robots use the lack of gravity to aid in material removal, this research into energy-efficient tunnelling methods would be useful on our own planet also.

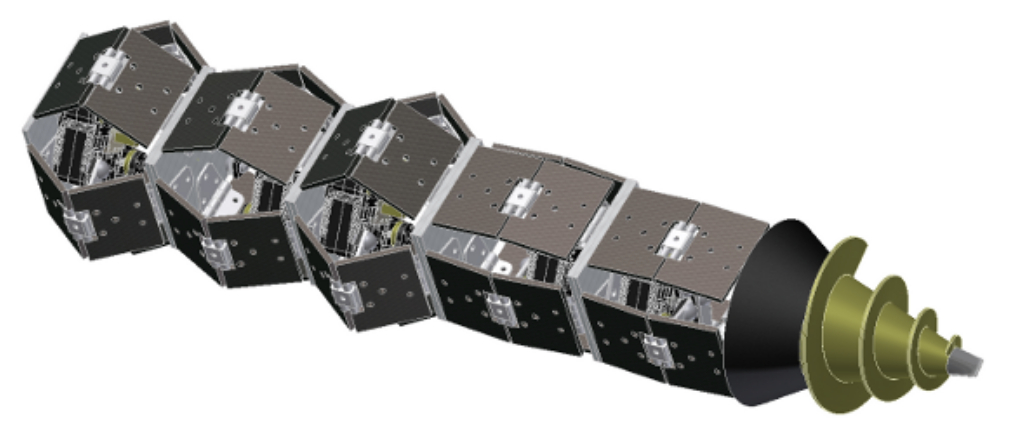
Other lunar drilling robots have incorporated novel designs that could be useful on earth [12] [13] [14].
The rotational motion of the drill head will induce a reaction moment in the drill body, but by incorporating dual heads that rotate in opposite directions, much of this rotational moment can be cancelled.
Kuhlman et al. built a prototype tunnelling robot with earthworm-like behaviour [15]. It uses a typical rotating drill head, like other designs, but also utilises a body with multiple segments that can expand and contract to create a worm-like motion.
Tunnel Boring Machines
Typically Tunnel Boring Machines (TBM) are very large machines that require many personnel to operate them. However, due to population expansion in cities, there is an increasing need to install more pipes and cables which requires digging small tunnels beneath existing infrastructure likes roads and buildings. This has resulted in miniature or micro-sized TBM that construct tunnels of around 1 metre in diameter. Due to the confined spaces of operation, these machines are semi-autonomous and able to be controlled be a single operator.
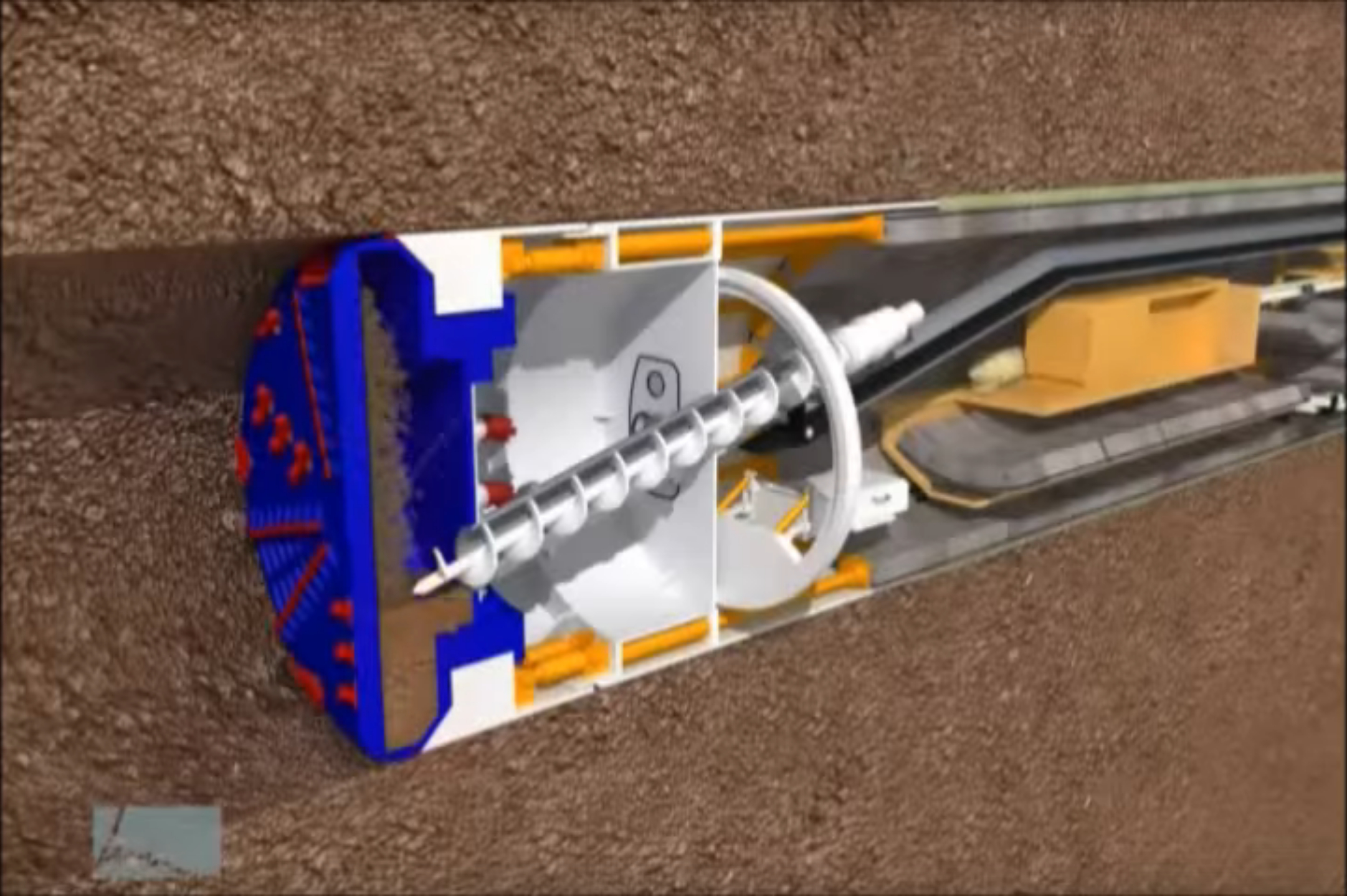
There are various models of mini TBM available, including those by Herrenknecht Co. and Frisch & Faust Tiefbau. The development of one such, fully robotic system for small diameter tunnel construction was detailed in [17]. These TBM are capable of making small radius turns and could potentially be further miniaturised and made fully autonomous.
Underground UGVs
Whilst we are most interested in autonomous robots that can move through ground substrates, the category of underground robots also includes those are designed to operate in a tunnel or cave. Some recent interest by groups interested in obtaining robots for this purpose makes them worthy of a mention. Their uses include search and rescue, border protection and military defence purposes.

It might seem that an Unmanned Ground Vehicle (UGV) could immediately be re-tasked for use in a tunnel, but unfortunately humans have difficulty navigating in this environment and traditional mapping and localisation (SLAM) algorithms for robots are proving unsuitable too.
The Idaho National Laboratory has created a specialised software operating system for UGVs operating underground and successfully tested it in tunnel environments with mobile robot platforms from iRobot and Foster Miller [18].
A new, proof-of-concept platform has been designed for the Air Force Research Labs (AFRL) Counter Tunnel Robotics Project [19] [20]. This robot will be capable of entering tunnels less than 1 foot in diameter, while being able to climb heights or traverse chasms of at least 2 feet width.

Current Research
The Defence Advanced Research Projects Agency (DARPA) recently awarded a USD$500,000 contract to Alliant Techsystems to build an unmanned underwater vehicle that can conduct surveillance operations in river environments, including burrowing into the riverbank or muddy floor [21].

The Defence Threat Reduction Agency (DTRA) is seeking ideas for Robotic Underground Munition (RUM) Technology [23]. The RUM vehicle would be one-time-use, delivered by a plane, make a soft landing on the ground, then tunnel underground towards a mission objective, such as destroying an underground bunker complex.
Proposed Design for an Autonomous Burrowing Robot
The key weakness with existing underground robots is their lack of maneuverability and inability to handle tougher ground surfaces like clay or rock. Therefore a world-class multi-purpose Autonomous Burrowing Robot would be capable of turning about a small radius of curvature, including on the vertical axis, and have a tough digging mechanism capable of penetrating soft rock.
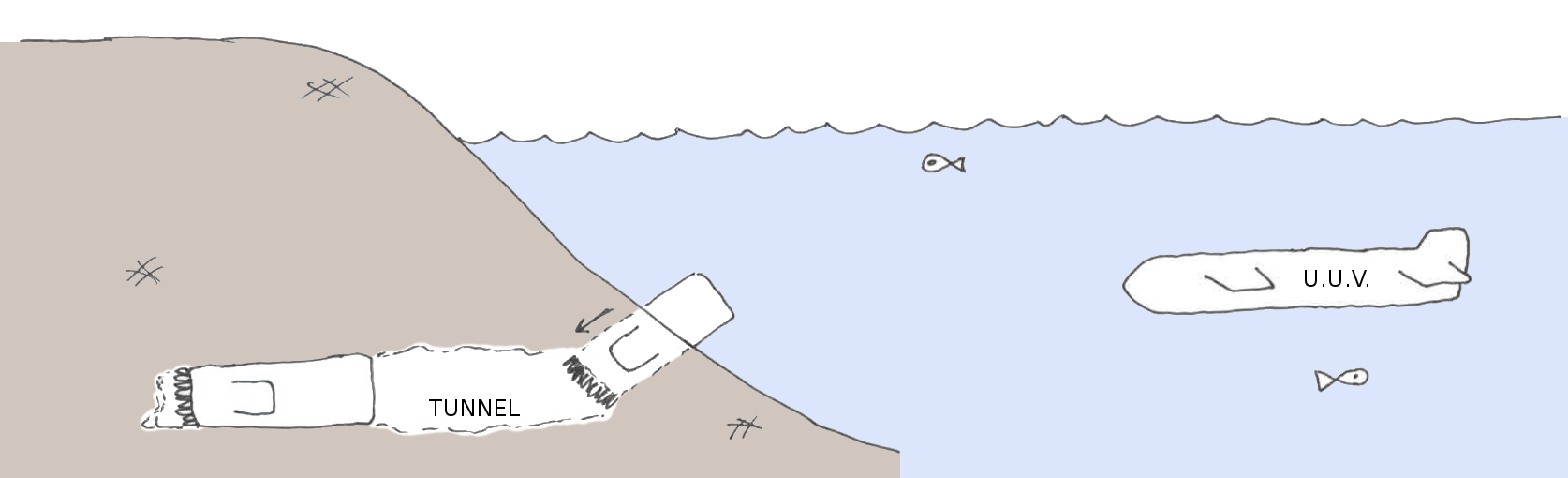
The proposed design is for an autonomous robot that can be launched from the sea, possibly utilising a Unmanned Underwater Vehicle (UUV) platform. The robot would be small-enough to avoid detection by enemy sonar and would embed itself into the side of the target land-mass, then burrow towards the mission objective (Fig. 15).
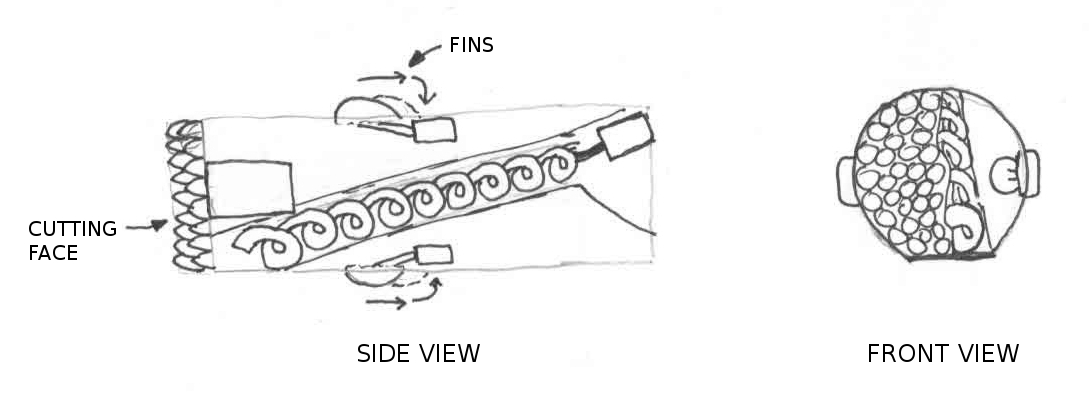
The digging mechanism would be based on a TBM, using a rotating cutting face. Similar to the space mining robots, twin counter-rotating cutting faces would be utilised to offset the rotational moment caused by the cutting action.
Loose material from the cutting face would be transported to the rear of the robot using a screw mechanism. Retractable fins along the barrel of the robot would be used both to stabilise the robot, during the cutting phase, and to advance the robot forwards using a reciprocating motion.
The robot could carry a surveillance or explosives payload. A surveillance mission would require sophisticated maneuverability to be able to position a camera or listening device where it would be useful. Whereas detonating an explosive under an enemy position would only require verification that the robot was position beneath the target objective.
The cutting mechanism, as well as the navigation and control systems, would require a significant amount of power. However, high-powered batteries with sufficient endurance are too physically bulky to fit in such a small, untethered robot. Therefore the likely power source would be a nuclear fuel cell.
Navigation and communications are very difficult underground and the robot would likely have to rely on internal navigation equipment, such as an Inertial Measurement Unit (IMU) and laser sensors. If operating in enemy territory, then even low-frequency subsurface communication would not be possible.
Conclusion
This paper has outlined the current state-of-the-art in autonomous underground robots. A thorough search of the literature revealed many mechanisms that could potentially be used as the base for such a robot, however no complete subsurface (digging or burrowing) robotic systems are currently available. The difficulty in building such a robot can be appreciated, with problems including varying types of ground substrate, ingress of dirt and water, pressure from material build-up, and navigation and power availability. A basic design for an autonomous burrowing robot was proposed and hopefully this will serve as inspiration for further research into this area of robotics.
| References | |
|
[1] R. G. Scott and R. C. Richardson, “Realities of Biologically Inspired Design with a Subterranean Digging Robot Example”, Proceedings International Conference on Robotics and Applications (IASTED), 2005
|
|
|
[2] R. Scott and R. Richardson, “A Novel USAR Digging Mechanism”, Proceedings of International Conference on Intelligent Robots and Systems (IROS), 2006
|
|
|
[3] R. Richardson, A. Nagendran and R. Scott, “The Sweep-Extend Mechanism: A 10-bar Mechanism to Perform Biologically Inspired Burrowing Motions”, Mechatronics Vol. 21, Issue 6, September 2011
|
|
|
[4] R. A. Russell, “CRABOT: A Biomimetic Burrowing Robot Designed for Underground Chemical Source Location”, Advanced Robotics, 2010
|
|
|
[5] R. A. Russell, “An Agile Burrowing Robot for Underground Chemical Source Location”, Proceedings of Australasian Conference on Robotics and Automation (ACRA), 2011
|
|
|
[6] Lizard-inspired robot can swim through granular material
http://www.gizmag.com/burrowing-robot-inspired-by-sandfish-lizard/18600/ |
|
|
[7] Koller-Hodac et al., “Actuated Bivalve Robot, Study of the Burrowing Locomotion in Sediment”, Proceedings of International Conference on Robotics and Automation (ICRA), 2010
|
|
|
[8] Winter at al., “Teaching RoboClam to Dig: The Design, Testing, and Genetic Algorithm Optimization of a Biomimetic Robot”, Proceedings of International Conference on Intelligent Robots and Systems (IROS), 2010
|
|
|
[9] Trimmer et al., “Caterpillar Locomotion: A New Model for Soft-bodied Climbing and Burrowing Robots, 7th International Symposium on Technology and the Mine Problem, 2006
|
|
|
[10] Richter et al., “Development and Testing of Subsurface Sampling Devices for the Beagle 2 Lander”, Planetary and Space Science, Volume 50, Issue 9, August 2002
|
|
|
[11] Watanabe et al., “A Mole-Type Drilling Robot for Lunar Subsurface Exploration”, Proceedings of the 7th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), May 2003
|
|
|
[12] K. Nagaoka, T. Kubota and M. Otsuki, “Experimental Study on Autonomous Burrowing Screw Robot for Subsurface Exploration on the Moon”, Proceedings of International Conference on Intelligent Robots and Systems (IROS), 2008
|
|
|
[13] Nagaoka et al., “Robotic Screw Explorer for Lunar Subsurface Investigation: Dynamics Modelling and Experimental Validation”, Proceedings of 14th International Conference on Advanced Robotics (ICAR), 2009
|
|
|
[14] Abe et al., “Performance Evaluation of Contra-Rotating Drill for DIGBOT”, Proceedings of the SICE Annual Conference, 2010
|
|
|
[15] Kuhlman et al., “Robotic Tunneling Worm for Operation in Harsh Environments”, pre-print, NASA, 2011
|
|
|
[16] Animation of Tunnel Boring Machine, California High-Speed Rail Authority, April 2015
http://www.youtube.com/watch?v=le6KncOeZlE |
|
|
[17] Y. Kimura, T. Saito and T. Sakurada, “Development of a Fully Automatic Robotic System for Small Diameter Tunnel Construction: Development of the ACE MOLE 1200-M2 Construction Method”, Automation and Robotics in Construction XI, 1994
|
|
|
[18] K. Rolston, “Using Smart Robots to Navigate Smugglers’ Tunnels,” Idaho National Laboratory, November 2009
https://inlportal.inl.gov/portal/server.pt?open=514&objID=1269&mode=2&featurestory=DA_325880 |
|
|
[19] AFRL (Air Force Research Labs) Counter Tunnel Robotics Project
http://bldgblog.blogspot.com/2011/09/tunnel-countertunnel.html |
|
|
[20] Proof of Concept Platform for AFRL Counter Tunnel Robotics Project, Technical presentation at AUVSI’s Unmanned Systems North America, August 2011
http://www.auvsi.org/Australia/ViewDocument/?DocumentKey=186662c3-2435-4f99-b004-31b457434216 (website offline) |
|
|
[21] DARPA seeks crawling, burrowing river-recce sub bot, The Register, October 2008
http://www.theregister.co.uk/2008/10/31/darpa_squids_in/ and DOD SBIR Archive: http://www.dodsbir.net/sitis/archives_display_topic.asp?Bookmark=30643 |
|
|
[22] US Building Ground-Drilling Bomb-Delivering Robot, The Tech Journal, March 2010
https://thetechjournal.com/tech-news/us-building-ground-drilling-bomb-delivering-robot.xhtml |
|
|
[23] Request for Information for Robotic Underground Munition (RUM) Technology, US Defense Threat Reducton Agency
https://www.fbo.gov/index?s=opportunity&mode=form&id=1021a87dd2c2cfcef17d34e4258ae0cd&tab=core&_cview=0 |